Notice: Undefined offset: 1 in /home/robopro2/robopro.jp/public_html/wp2/wp-content/themes/tkps/library/bones.php on line 315
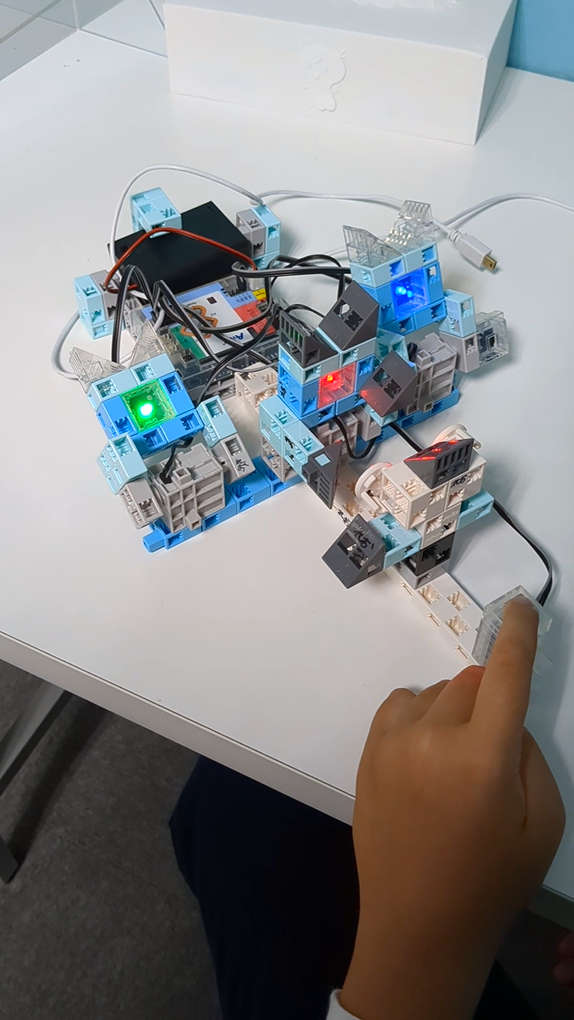
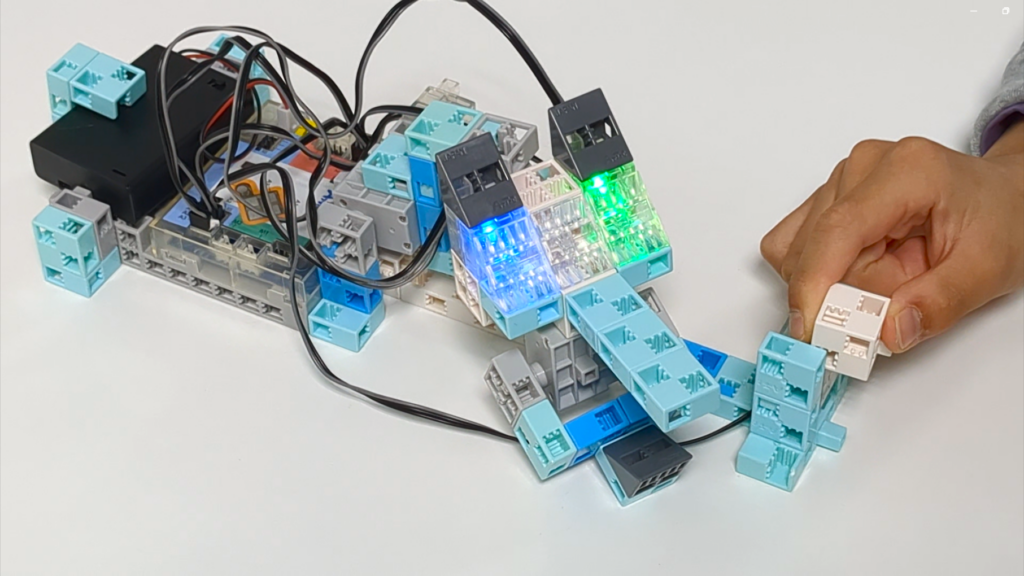
Reoさんの作品です。 鬼退治ゲームを作りました。 ボタンを連打することで、桃侍が3匹の鬼を倒す、というゲームです。 一定時間内に40回連打すれば勝ち!! 果たして鬼を倒すことができるのか……!!👊👹
営業時間 月~土 10:00~19:00
Reoさんの作品です。 鬼退治ゲームを作りました。 ボタンを連打することで、桃侍が3匹の鬼を倒す、というゲームです。 一定時間内に40回連打すれば勝ち!! 果たして鬼を倒すことができるのか……!!👊👹
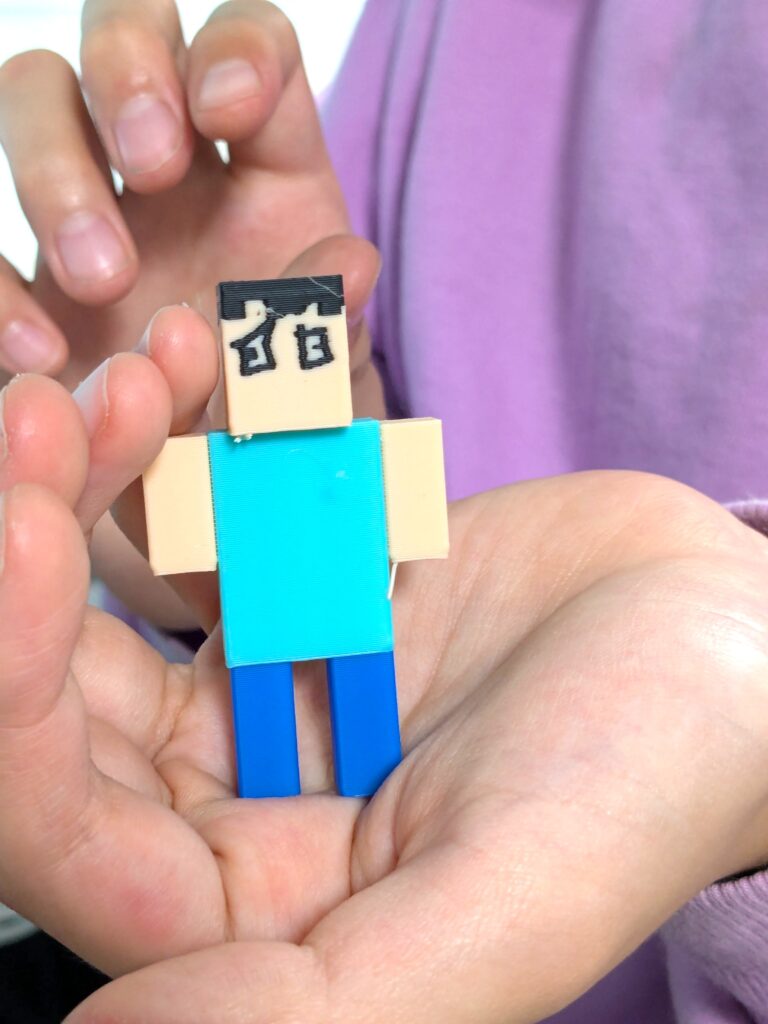
Senaさんの作品です。 マイクラのキャラクターをモデリング。3Dプリンターで上手に出力できました!! マイクラのカクカクした感じに見事マッチしてます👍✨

Sakurakoさんの作品です。 魚釣りゲームをつくりました。 マウスで釣り針を操作して、魚をつりあげると得点になって、危険生物を釣るとゲームオーバーです!! なにが釣れるか、ワクワクドキドキ…🦈
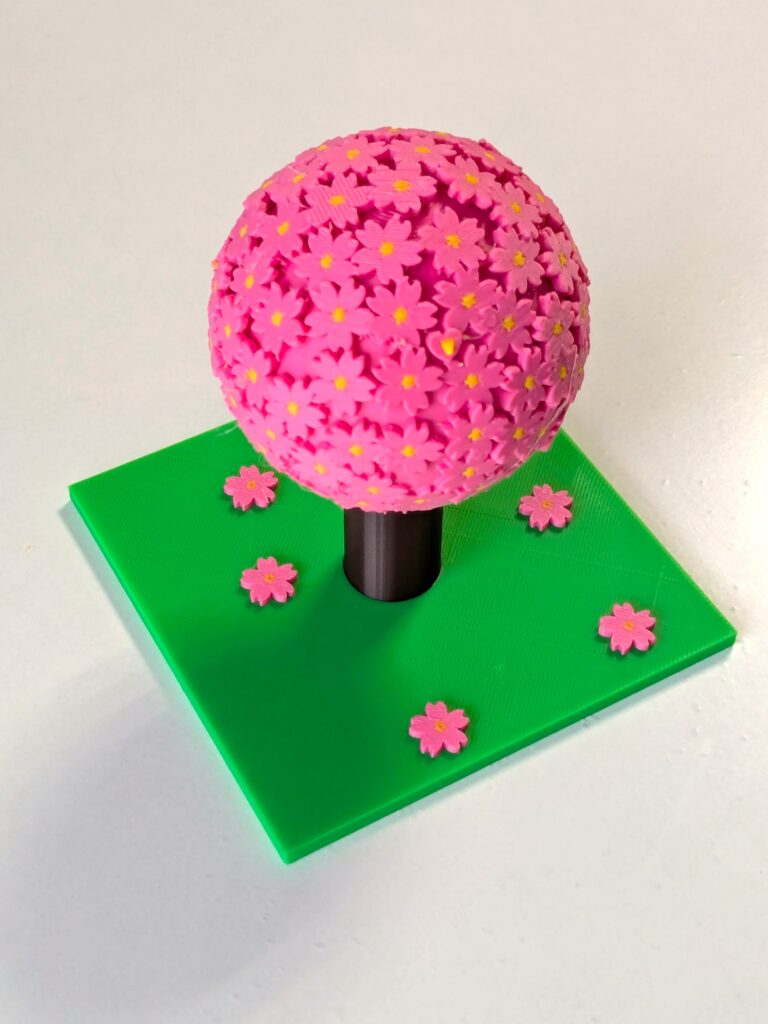
Ibukiさんの作品です。 TinkerCADでデザインした桜の木を3Dでプリンターで出力しました。 はなびらをひとつひとつ根気強く画面上で貼り付けました!! ひとつだけハートが入っているところもお洒落ポイントです👍🌸

Akitoさんの作品です。 Blenderでモデリングしたゲームキャラクターを3Dでプリンターで出力しました。 目の仕上がりにちょっと不満なようでしたが、とても良くできていると思います!!

Yukiさんの作品です。 Blenderでモデリングしたゲームキャラクターを3Dでプリンターで出力しました。 長い時間をかけてやっと完成させた大作です!! 仕上がりは大満足の作品になりました✨

Tomaさんの作品です。 オリジナルのキャラクターをBlenderで創作して、3Dプリンターで出力しました。 とてもクオリティが高く素晴らしい出来栄えです!!✨
Toseiさんの作品です。 なぜかチェーンソーを作っちゃいました。 タッチセンサーをおすとノコギリが回転しだします…!!

Kakoさんの作品です。 3Dプリンターで迷路をつくりました。 まさに立体迷路!!見た目もかわいくてすごいクオリティです✨⭐
Gakuさんの作品です。 番犬ゲームロボットを作りました。 骨(餌)をとると、ランダムで目を覚ますゲームです。犬の動作や音にこだわって作りました!! 犬が目を覚まさないよう、慎重に……🐕🦴