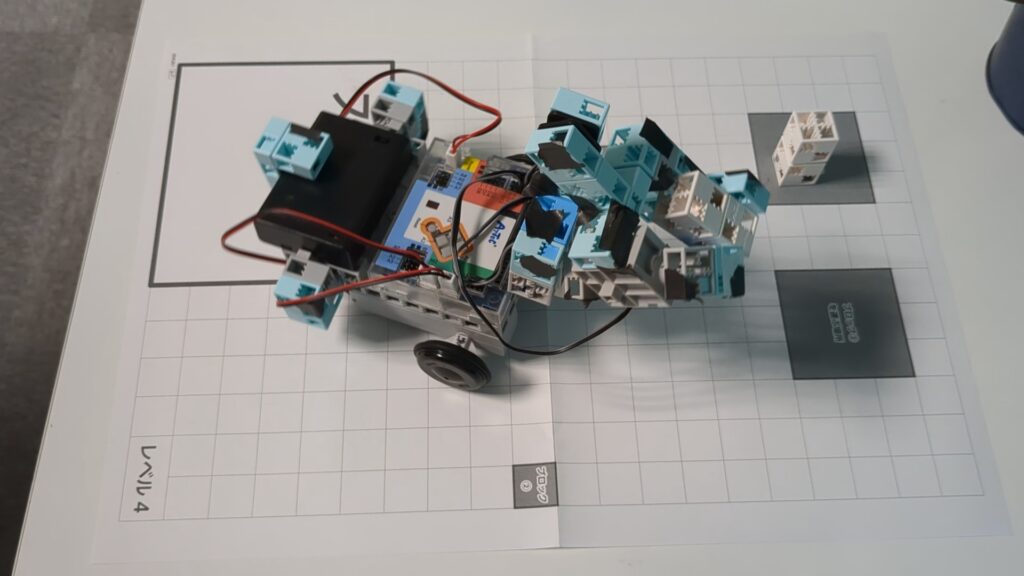
Harutoさんの作品です。 プログラミングで2つのブロックを搬送できるロボットを作りました! 正確に指定された位置に運搬できていますね!
営業時間 月~土 10:00~19:00
Harutoさんの作品です。 プログラミングで2つのブロックを搬送できるロボットを作りました! 正確に指定された位置に運搬できていますね!
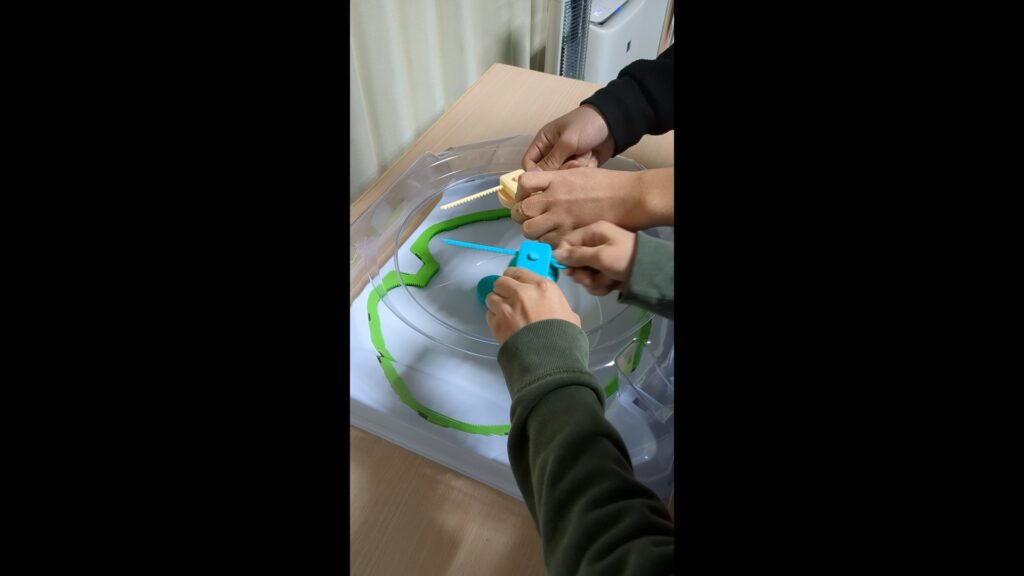
3Dプリンターでつくったコマで遊ぶ二人。 中学生でも夢中に楽しんでいました!
Sosukeさんの作品です。 サーボモーターを加速度センサーで操作して、DCモーターでゴム銃の引き金を回しています。 男のロマンが詰まっていますね!

Harutoさんの作品です。 現実に実在するスポーツカーであるジェスコ・アブソリュートを作りました! とんでもなく速く走れそうですね!

Yukaさんの作品です。 マイクラにでてくるキャラクターとオニをTinkerCADでモデリング。3Dプリンターで出力しました! どちらとも小さいのに細かいところまで再現されていてこだわりを感じますね!
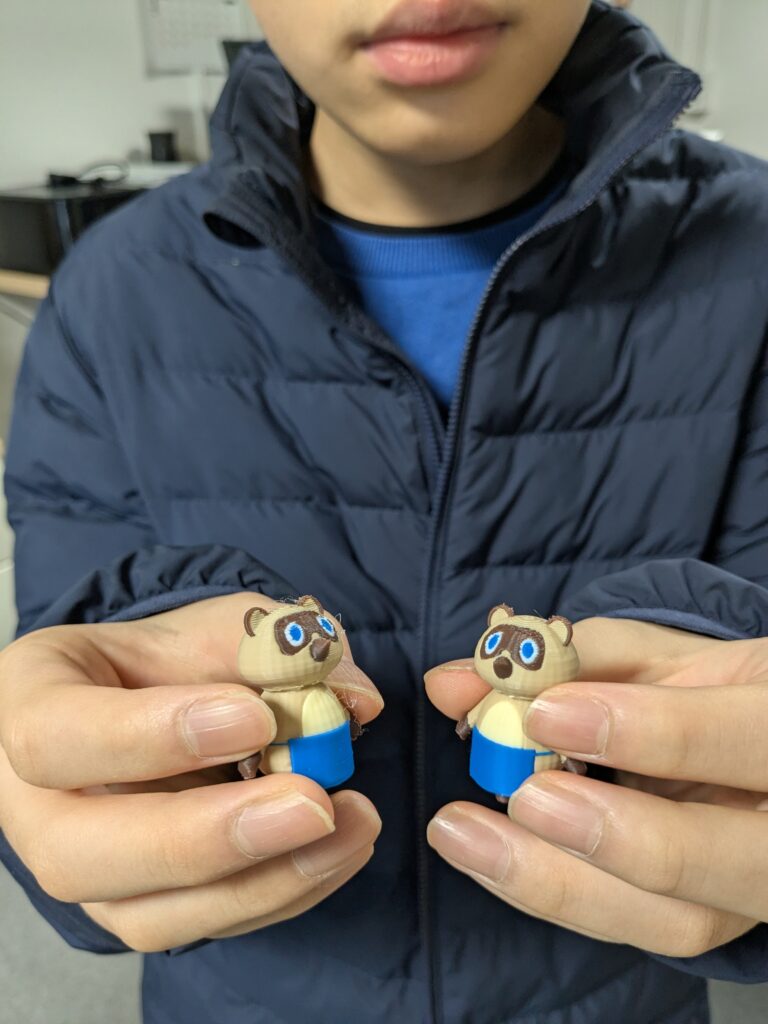
Sintaroさんの作品です。 TinkerCADで、あつ森のキャラクターとオリジナルのオニをつくりました。 小ささもあいまって可愛ですね!
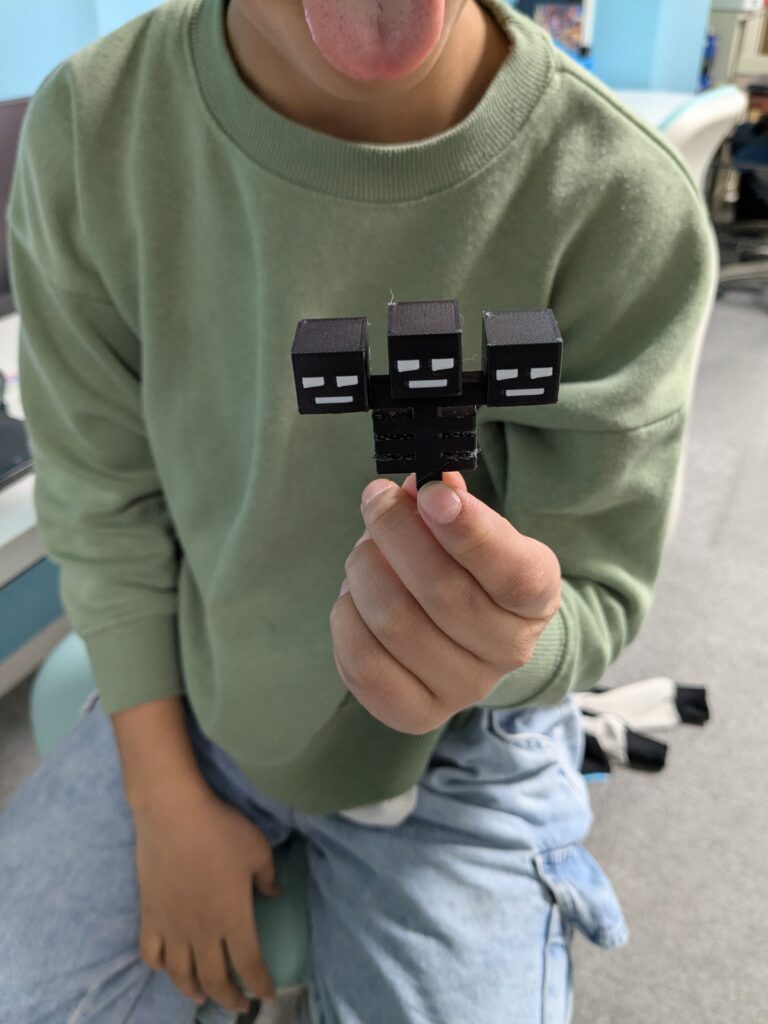
Koseiさんの作品です。 マイクラのキャラクターをTinkerCADでつくりました。 ウィザーの独特のフォルムを上手に再現できていますね!
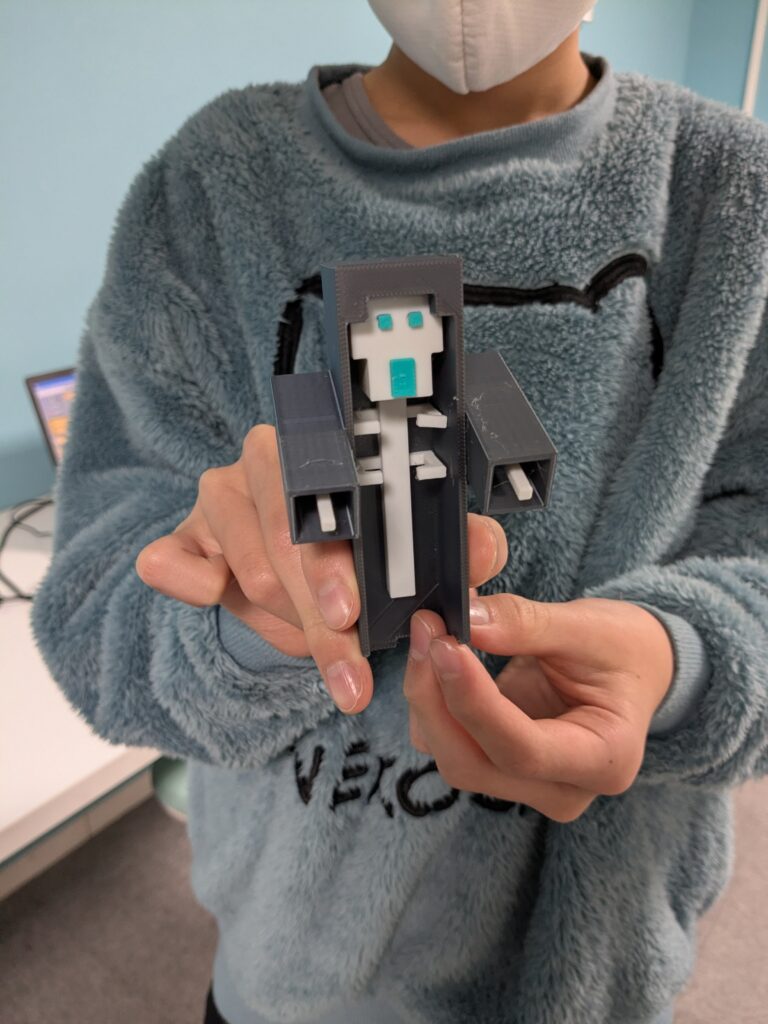
Senaさんの作品です。 TinkerCADでマイクラのキャラクターをつくりました。 骸骨のキャラクターなので服との隙間が再現されていてとてもすごいですね!
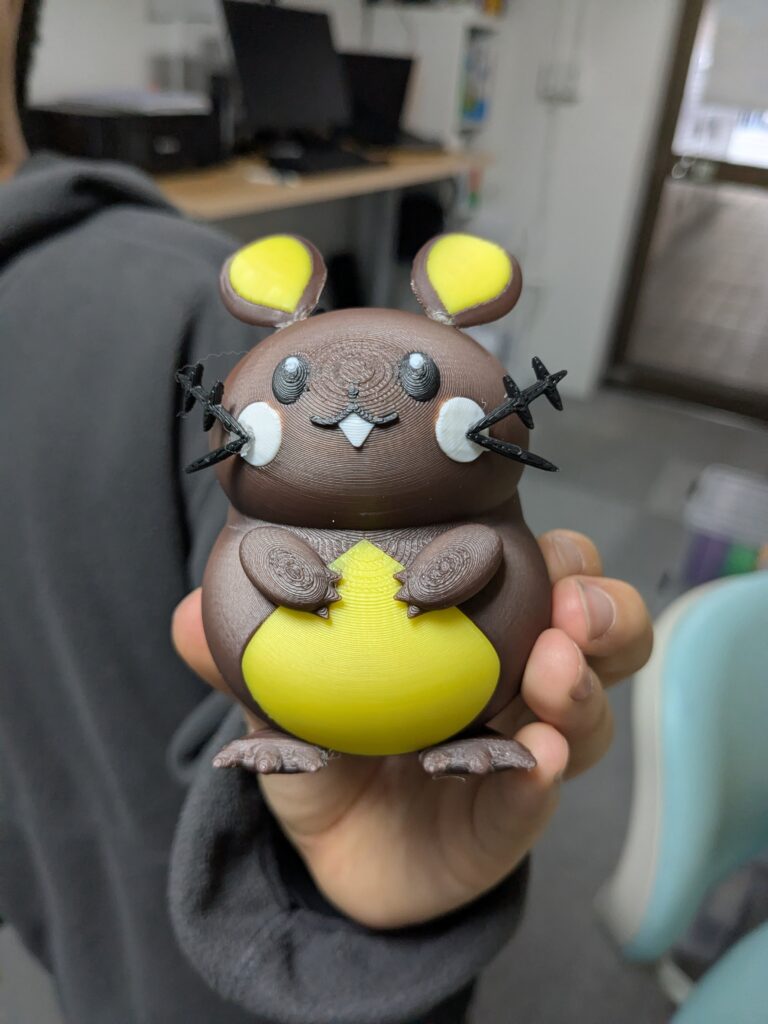
Harutoさんの作品です。 だいすきなポケモンを色違いでリアルにつくりました! 手のひらになるべく大きめに作りました。ほんとうは実物大でつくりたかったけど、これもかわいいですね!

Sumireさんの作品です。 節分にちなんで、オニがモチーフのポケモンをBlenderでモデリングして、3Dプリンターで出力しました。 細部にこだわって、小さい部品はあとから接着しているところもあります。 むずかしかった …