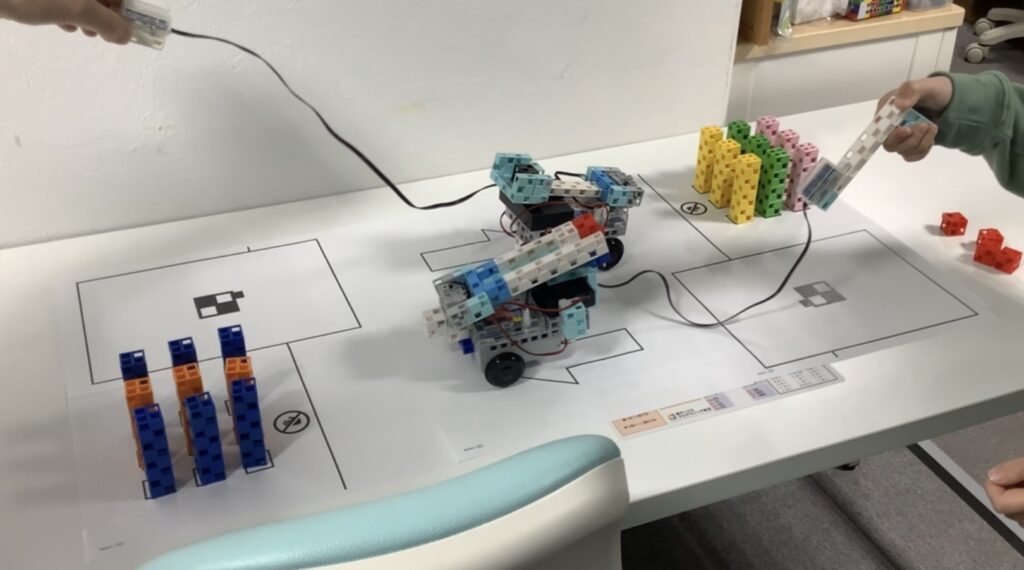
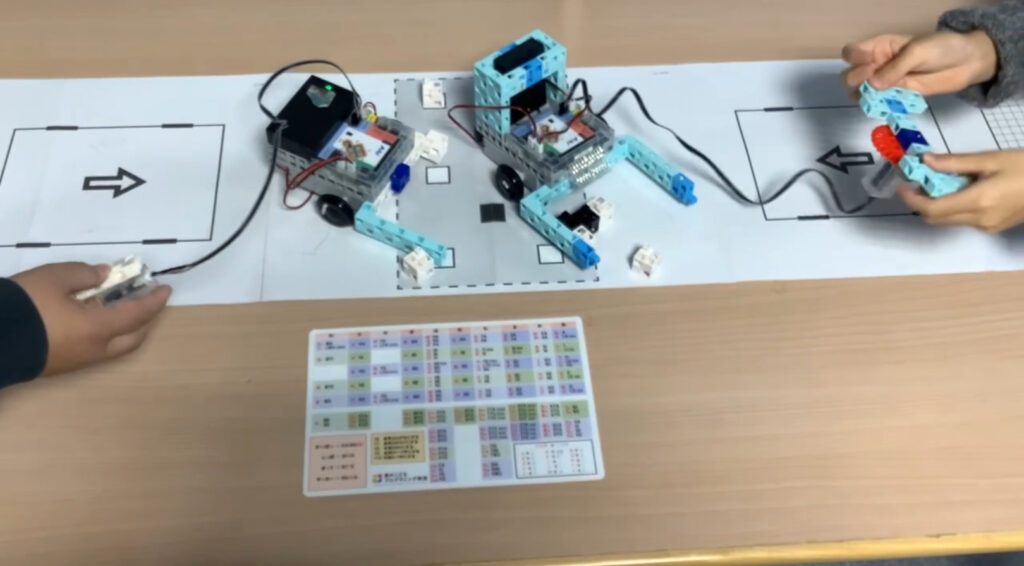
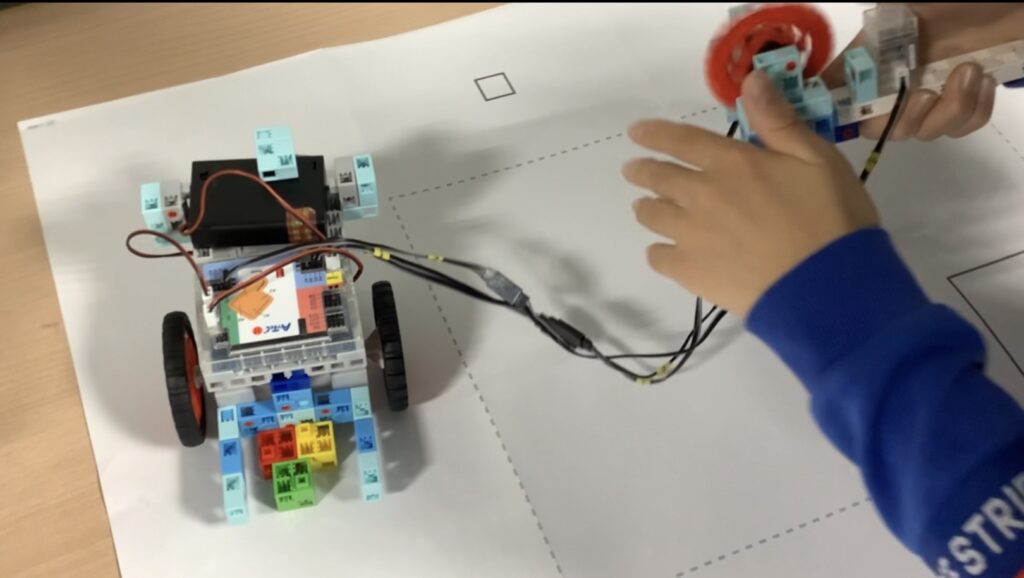
YoTさんの作品です。 ブロックを投げて、前にあるブロックタワーを倒すロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に倒すと曲がり、大きく振るとブロックを投げることが …
営業時間 月~土 10:00~19:00
YoTさんの作品です。 ブロックを投げて、前にあるブロックタワーを倒すロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に倒すと曲がり、大きく振るとブロックを投げることが …
RMさんの作品です。 横に動く的を、輪ゴムの鉄砲で撃つ射的ゲームのロボットです。 台は2段になっていて、後ろにはそれぞれサーボモータと歯車がついています。サーボモータは2つ同時に動き、途中で小刻みに動くなどの変則的な動き …
SoTさんの作品です。 前にあるブロックのタワーめがけて、ブロックを投げて倒すロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に倒すと曲がり、大きく振るとブロックを投げ …
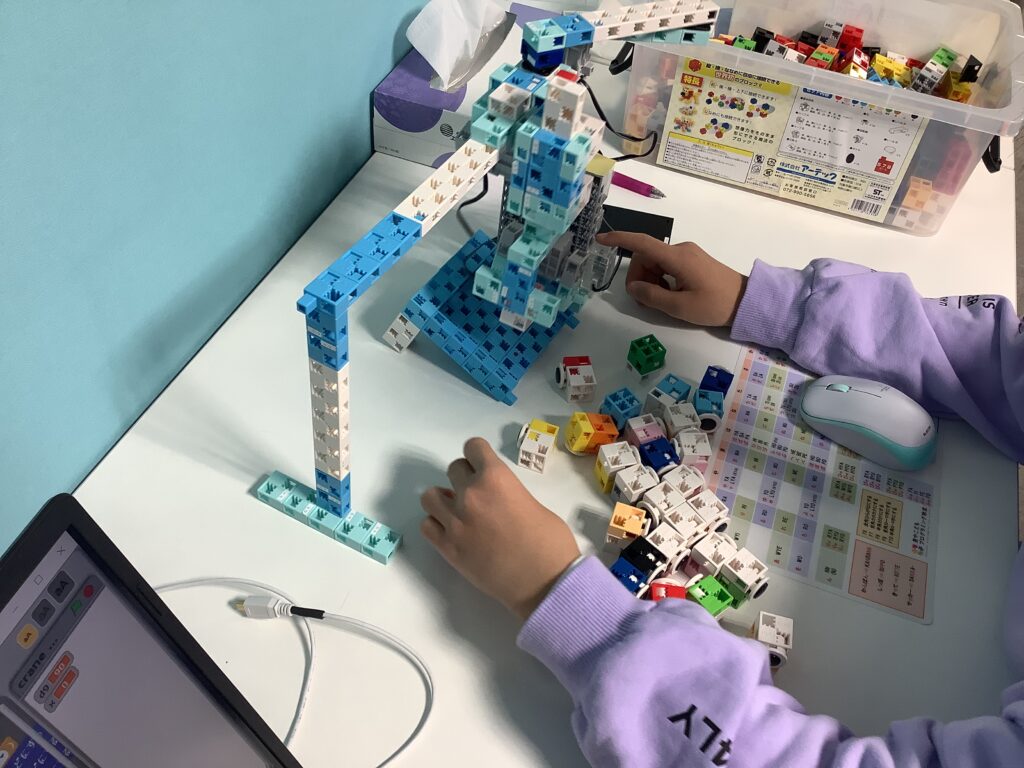
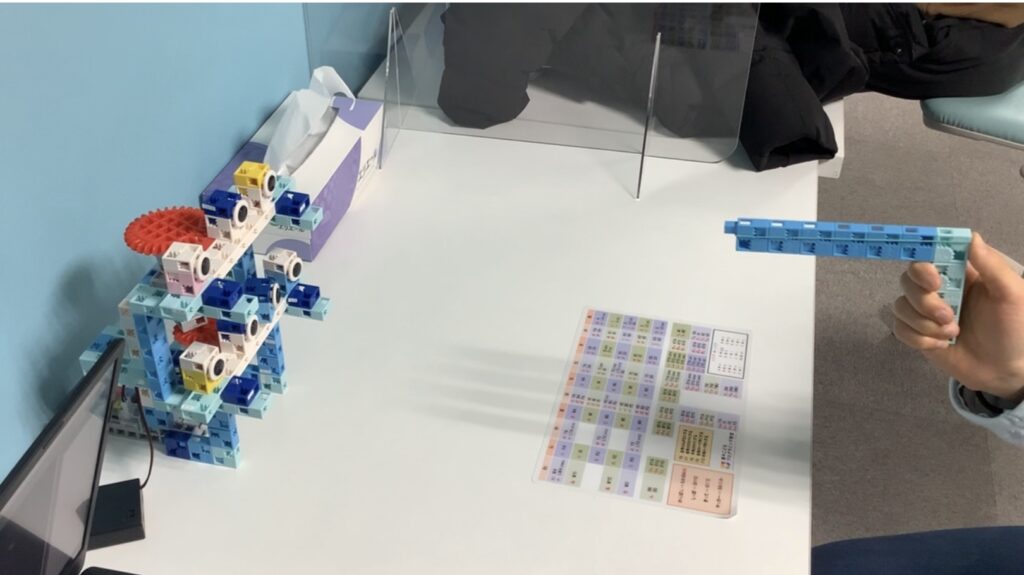
RMさんの作品です。 クレーンで景品にみたてたブロックを掴み上げ、運ぶクレーンゲーム機を作りました。 右横にあるタッチセンサーを押すと、クレーンが左に移動し、下に降りてから景品を掴みます。景品を掴むと元の場 …
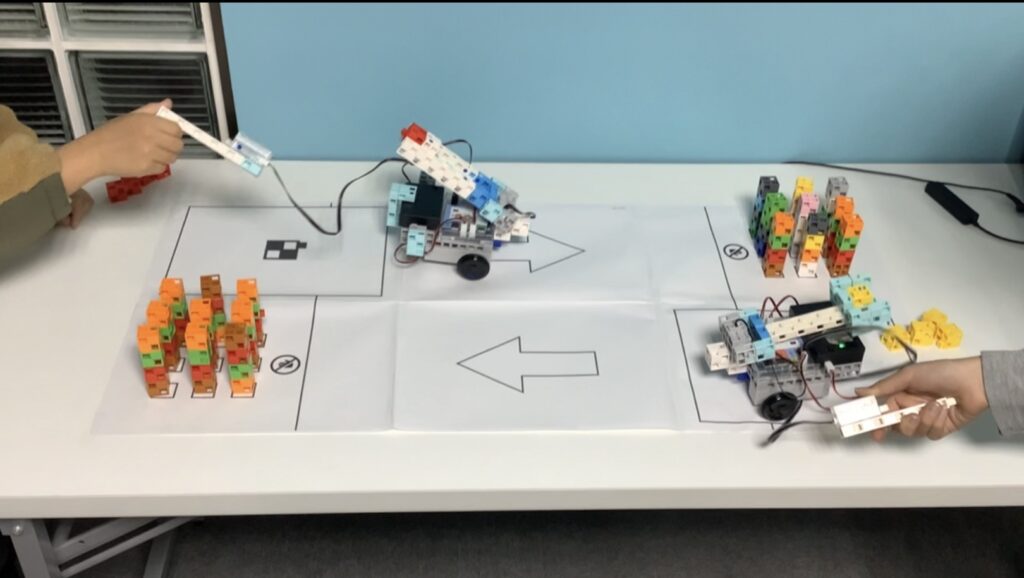
KoMさんの作品です。 ロボットを操作してブロックを取り合う対戦ゲームです。 コントローラに加速度センサーを使っていて、センサーが傾きを検知して傾けた方向にロボットが進みます。 制限時間の1分以内に中央にあるブロックを自 …
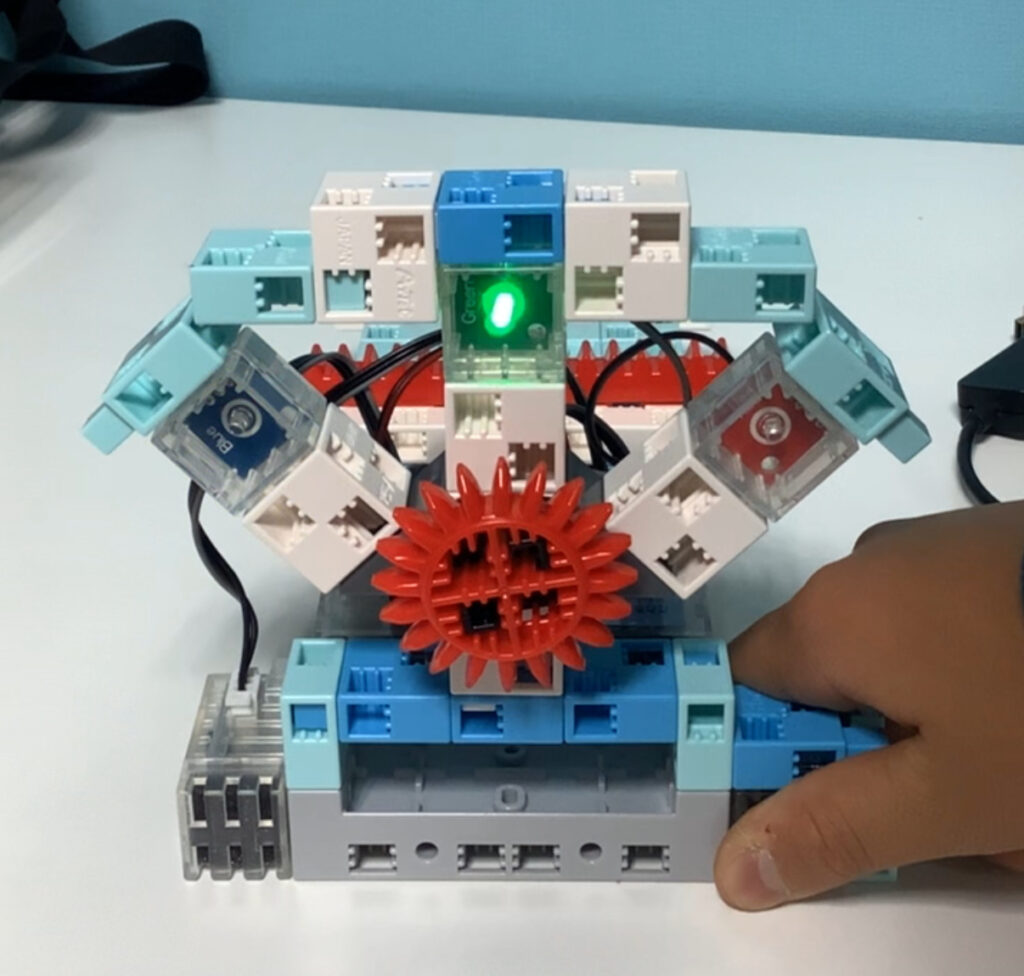
SPさんの作品です。 明るさに反応して光り方が変わるイルミネーションです。 右の光センサーで、周りの明るさを調べています。 明るいところだと、三色のLEDが一定の速さで光ります。 光センサーを指で隠して暗くすると、LED …
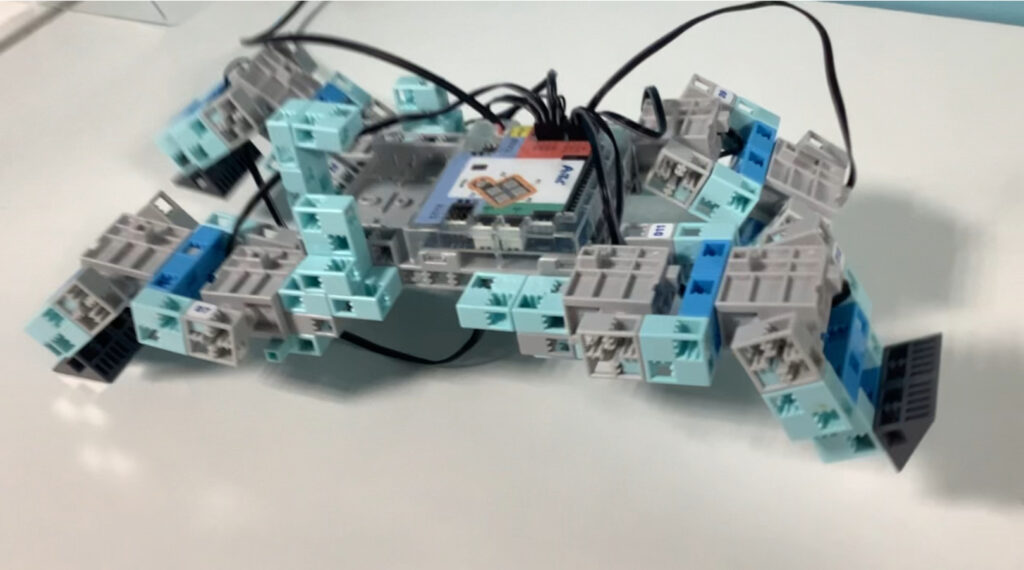
KaHさんの作品です。 4本の足で前に進むオリジナル四足歩行ロボットです。 合計8個のサーボモータを使って、4本の足を動かしています。 足の動きは四つのステップに分かれていて、一つ一つプログラムしています。 サーボモータ …
STさんの作品です。 加速度センサーを使ったバトルロボについて説明してくれました。 加速度センサーがコントローラになっていて、センサーを傾けた方向に進みます。 さらに、加速度センサーを上下に振ると、アームが上下に動いて攻 …
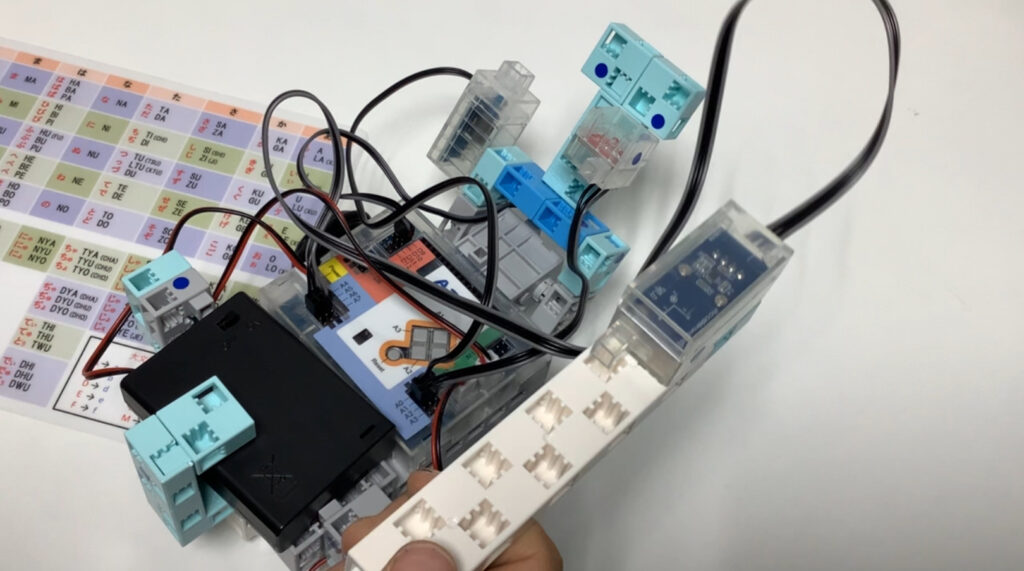
HTさんの作品です。 歯車を動かして操作するロボットです。 コントローラにある歯車を回す速さの計測に、ロータリーエンコーダーの仕組みを使っています。2つの赤外線フォトリフレクタを使って、歯車が赤外線を何回遮ったかを調べて …
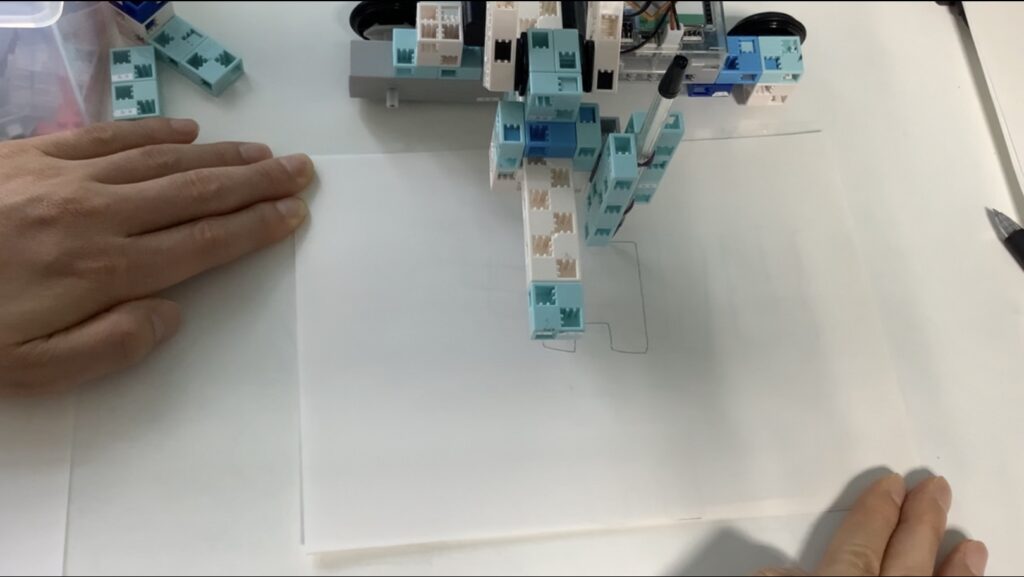
RMさんの作品です。 ペンを動かして、絵を描くことができるロボットです。 DCモーターでロボットを横向きに動かして、横の線を描くことができます。またサーボモータと回転軸で、ペンを縦に動かすことができます。 縦横を描く際の …