2025年7月のプログラミング体験教室を開催。2名の方に参加いただきました。 Scratchでは魚を描いて泳がせます。きれいな色のクラゲと魚をつくりました。 クラゲの絵をTinkerCADでモデリング。3Dプリンター …
営業時間 月~土 10:00~19:00
2025年7月のプログラミング体験教室を開催。2名の方に参加いただきました。 Scratchでは魚を描いて泳がせます。きれいな色のクラゲと魚をつくりました。 クラゲの絵をTinkerCADでモデリング。3Dプリンター …

2025年7月13日のマイクラ部を開催しました!! みんなでマイクラをやりました。今回は2つのチームに分かれて、それぞれの拠点のベットを守るために、クリエイティブモードで砦をつくります。 砦が完成したらゲームスタート。一 …

Kakoさんの作品です。 TinkerCADでモデリングしたデザインを、3Dプリンターで出力してLEDランプを作りました!! 夏のもので埋め尽くされていて、とても爽やかなランプです🍉

Harutoさんの作品です。 TinkerCADでモデリングした車が完成しました。 銀のリングがついたおしゃれなタイヤがチャームポイントです!!
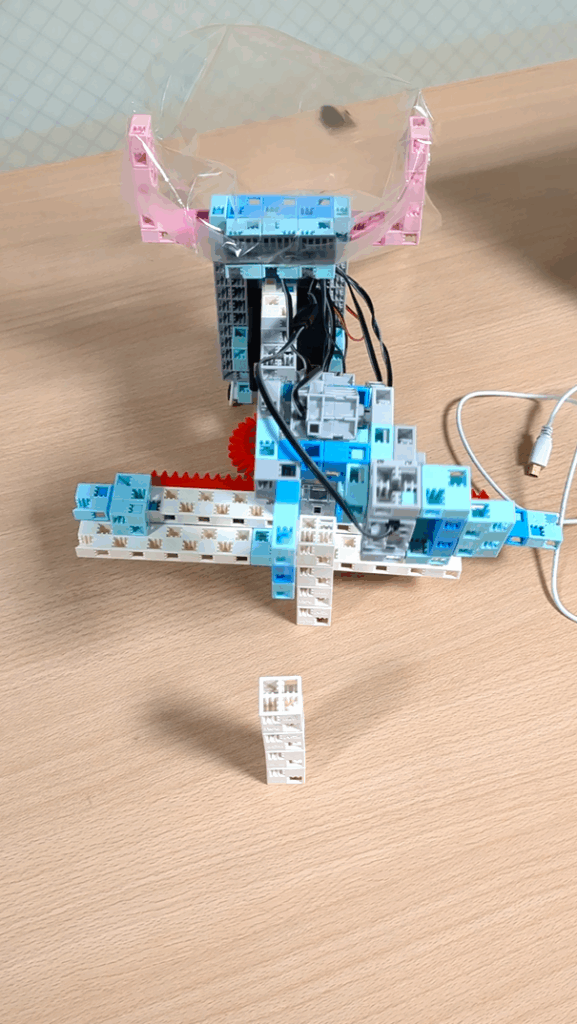
Riruさんの作品です。 加速度センサーをつかって、ジョイスティックコントローラーと、サーボモーターでうごく発射台をつくりました。 その発射台で輪ゴムを飛ばして遊ぶ、的あてゲームをつくりました。 さらに改造して、魚つりゲ …
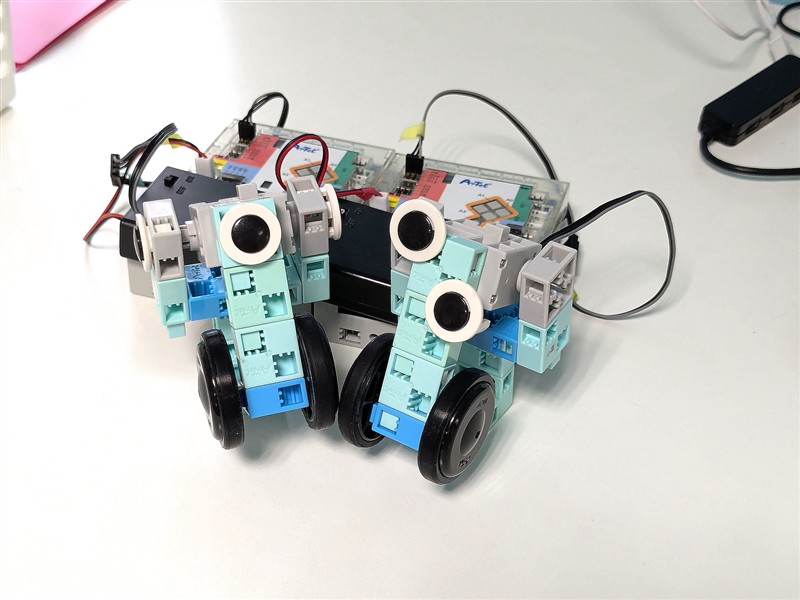
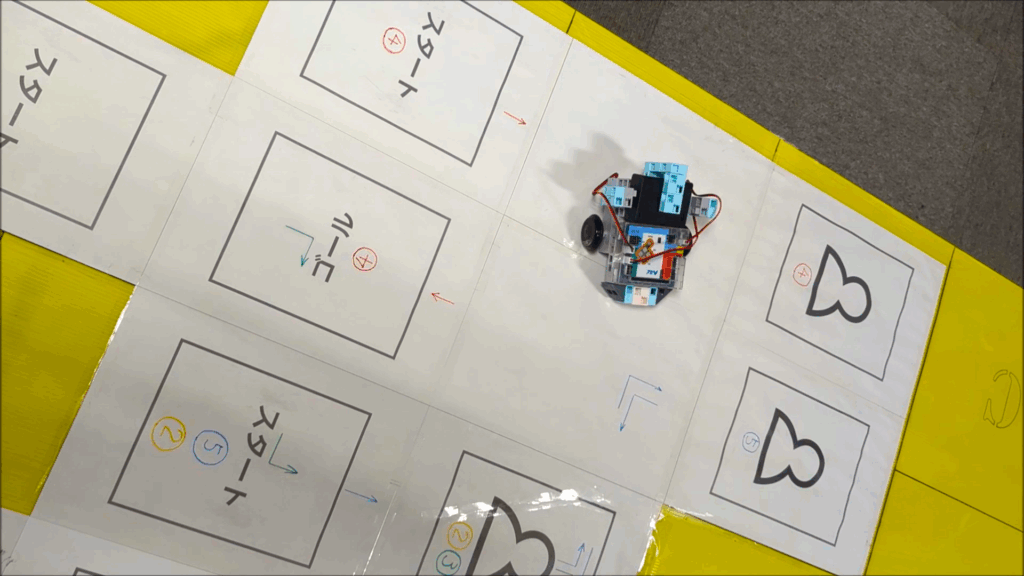
Senaさんの作品です。 赤外線フォトリフレクタというセンサーをつかって、進行方向にある壁を検知して曲がる車をつくりました。 すこしずつ調整しながら、3つの壁にぶつからずに進むようになりました!! 壁を避けて進むかしこい …
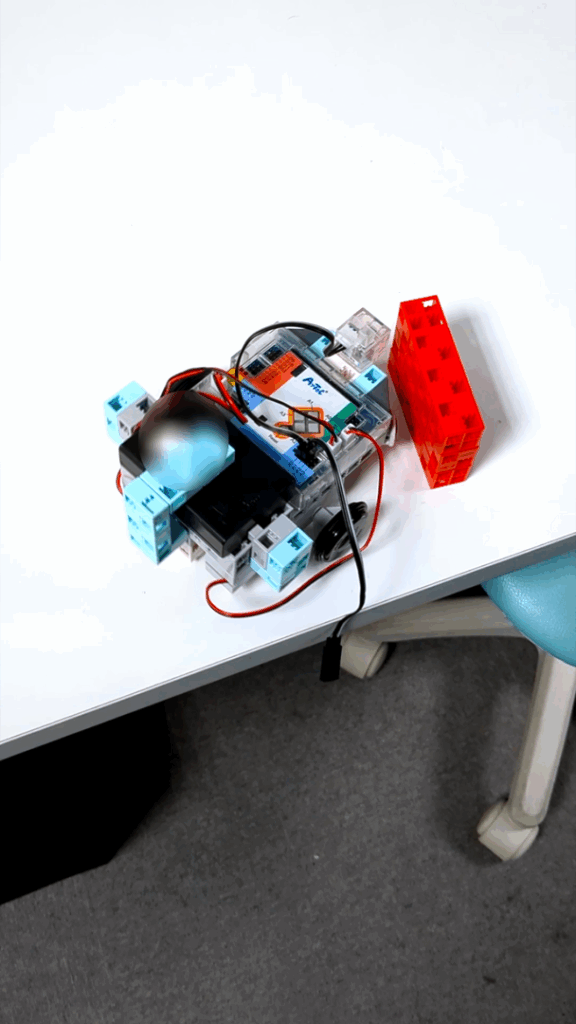
Gakuさんの作品です。 ブロックをセンサーで検出しながら前進するロボットを作りました。 ブロックを検出するとアームで後ろの袋に回収します!! すごく便利なブロック検知ロボットで、どんどん回収🤖
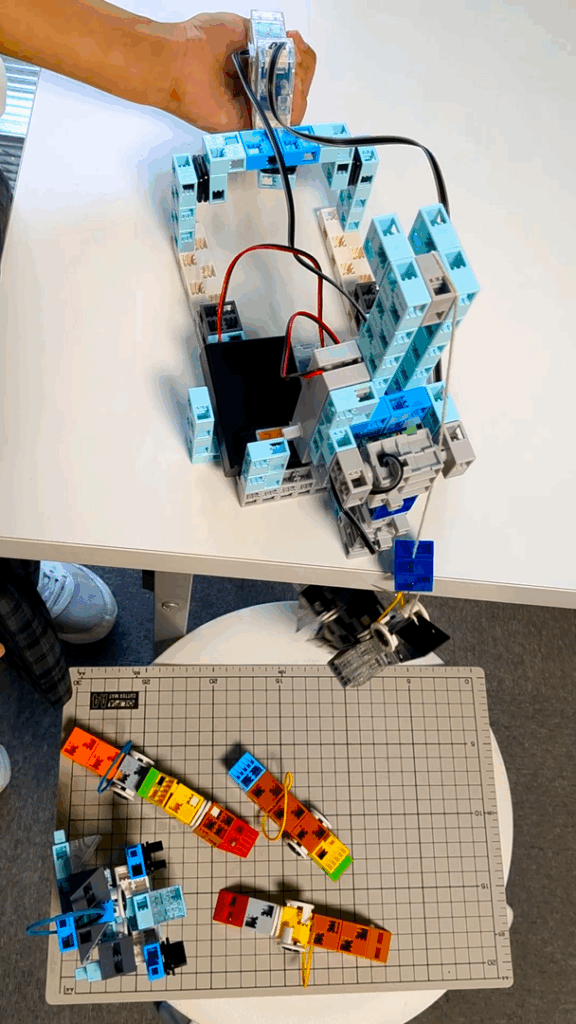
Sumireさんの作品です。 2つのDCモーターを操作して、目的地へすすむ自動車ロボットを作りました。 途中でお客さんをのせてゴールを目指す、タクシーを模した課題にチャレンジしました!! ゴールまでお客さんを連れていける …
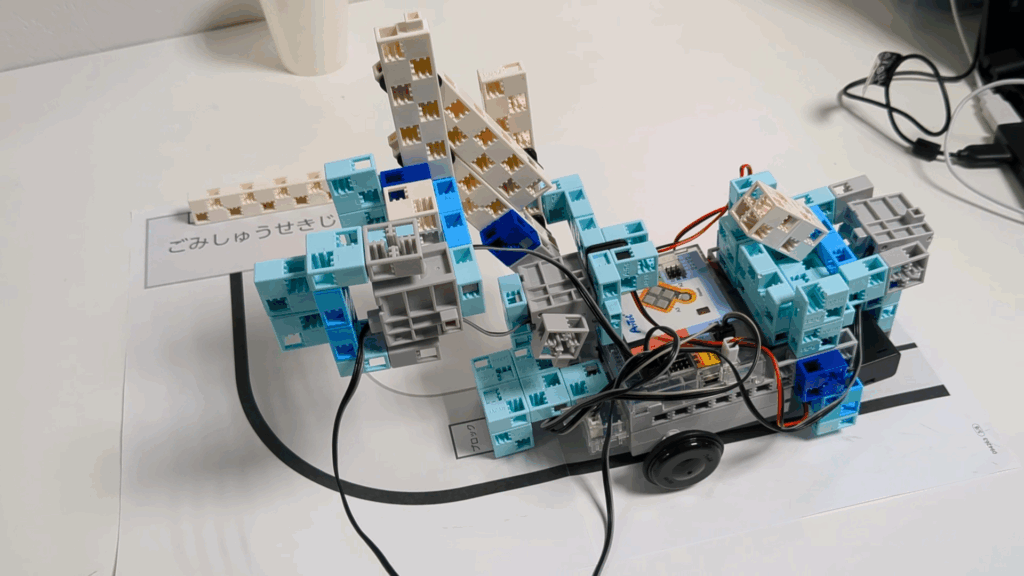
Sosukeさんの作品です。 ゴミにみたてたブロックを拾って荷台にのせてゴールに進むロボットです。 ロボットの形状とプログラムはオリジナルです!! ちゃんと荷台に運んで集積場までいく姿は、本物の収集車です🚛
2025年6月8日日曜日のプログラミング体験教室を開催。2名の方に参加いただきました。 Scratchでは水族館をつくりました。魚を書いて泳がせます。 マウスで絵を書くのは難しいのですが、一生けんめい書いてくれました! …