HAくんの作品です。
クランク機構をつかった歩行ロボットを作りました。
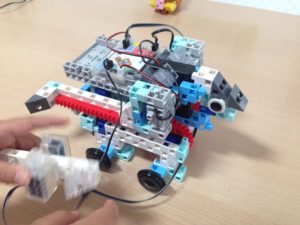
加速度センサーで前進後退を操作します。さらにボタン操作で相手をホールドできるアームも装備!
最後は、がっちりつかむはずでしたが壊れてしまいました。強度アップが課題ですね。
でも、自分で考えてつくったクランク機構のアイデアは素晴らしいし、操作するプログラミングもよく考えて作りました。
よくできました!
営業時間 月~土 10:00~19:00
HAくんの作品です。
クランク機構をつかった歩行ロボットを作りました。
加速度センサーで前進後退を操作します。さらにボタン操作で相手をホールドできるアームも装備!
最後は、がっちりつかむはずでしたが壊れてしまいました。強度アップが課題ですね。
でも、自分で考えてつくったクランク機構のアイデアは素晴らしいし、操作するプログラミングもよく考えて作りました。
よくできました!