ロボチャレ2026を開催しました!! 今年は、紙コップによりたくさんブロックを入れれたら勝ちです。 前編 後編 皆さんそれぞれの個性あふれるロボットを作ってくれました🤖 いざ勝負!! だれが1番多く入れれたかな…?
営業時間 月~土 10:00~19:00
ロボチャレ2026を開催しました!! 今年は、紙コップによりたくさんブロックを入れれたら勝ちです。 前編 後編 皆さんそれぞれの個性あふれるロボットを作ってくれました🤖 いざ勝負!! だれが1番多く入れれたかな…?
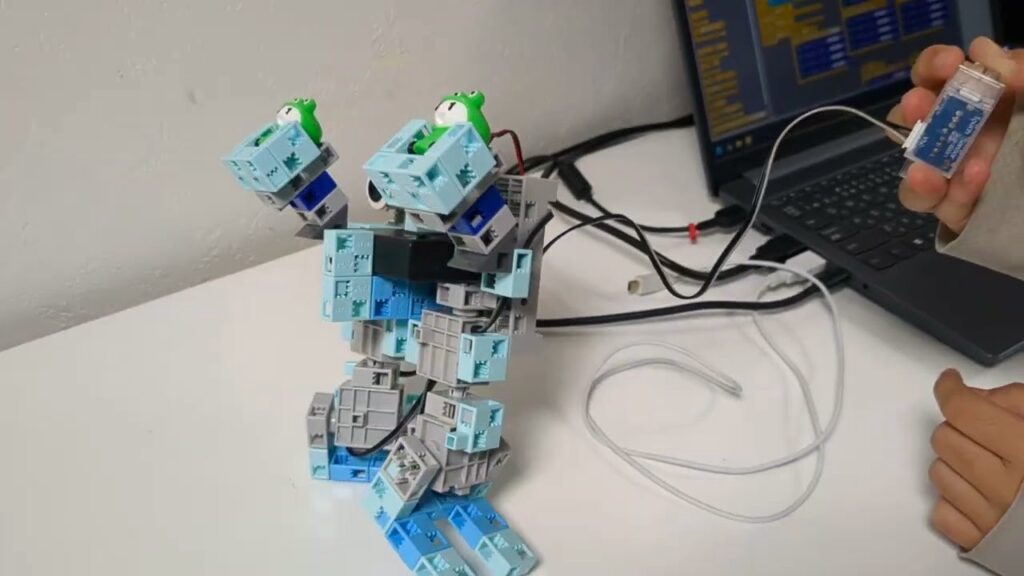
Sumireさんの作品です。 2足歩行ロボットをつくりました。 4つのサーボモーターを制御して動いています!! カエルトコピーを乗せて、歩いていきます🤖
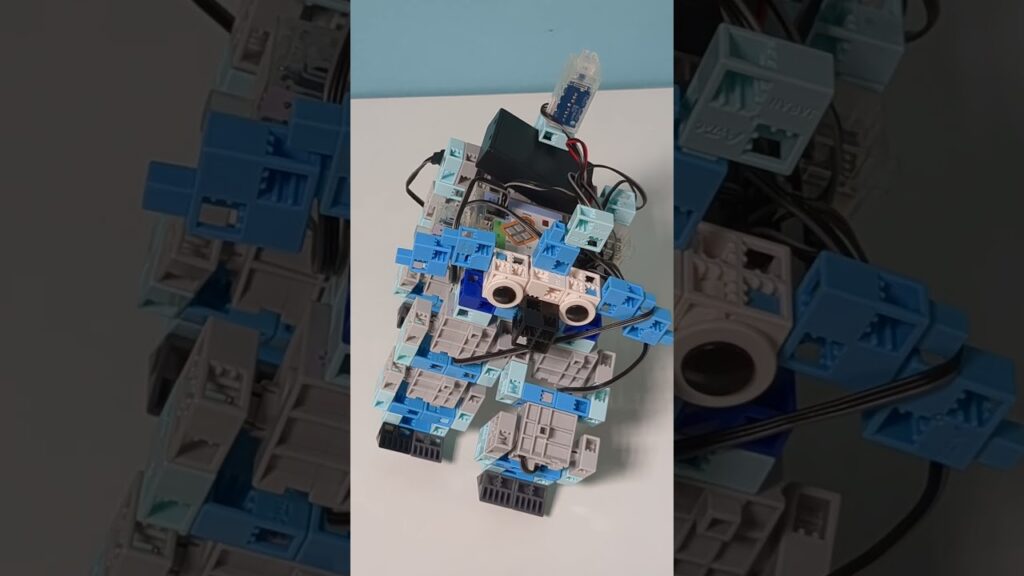
Riruさんの作品です。 4足歩行ロボットを作りました。 音楽を流しながら歩くようにアレンジもしてあります!! どこかで聞いたようなメロディとともに歩いてきます🎵👍
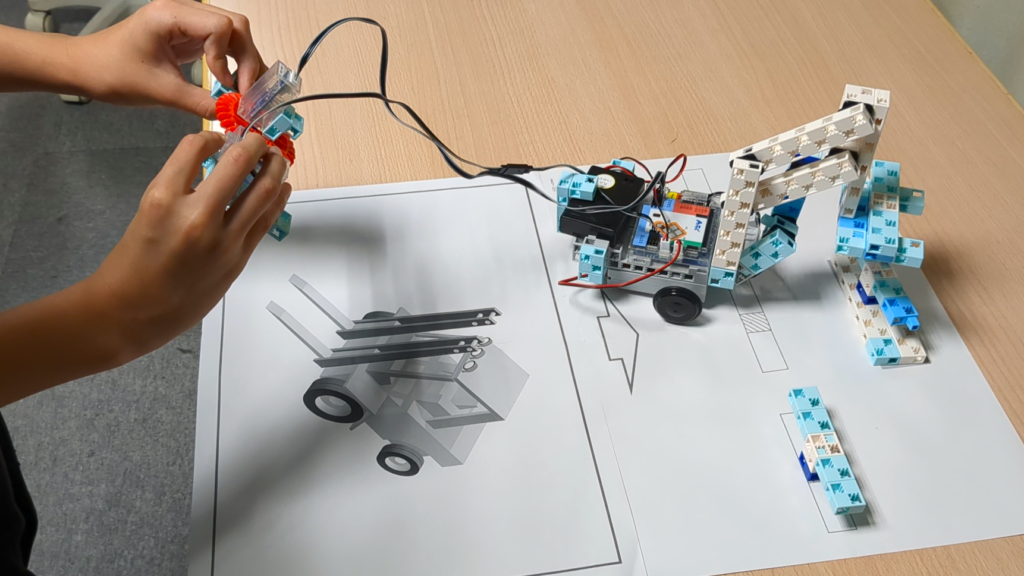
Senaさんの作品です。 フォークリフトロボットを作りました。 初めはうまく操作できなかったけど、プログラミングでモーターの速さやフォークリフトの上下の速さを調整して、 最後は3つ重ねることができました!!🥳
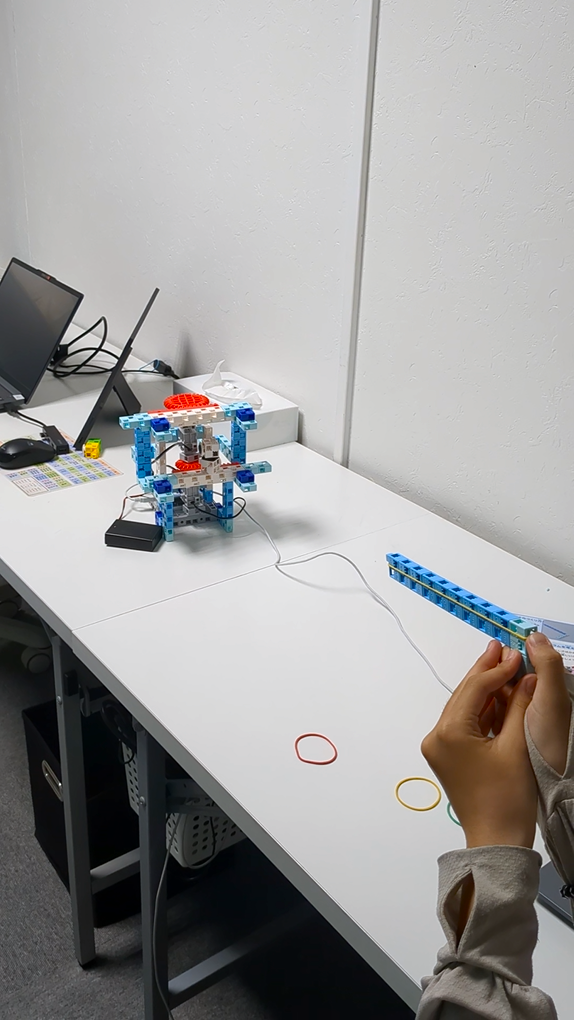
Sumireさんの作品です。 射的ゲームをつくりました。 モーターや歯車を使って、的を左右に動かしています!! 射的も上手でどんどん的が倒れていきます👍🔫
Sosukeさんの作品です。 フォークリフトロボットを作りました。 加速度センサーとタッチセンサーで車体とフォークを操作します!! パレットを3つ重ねることができました👍
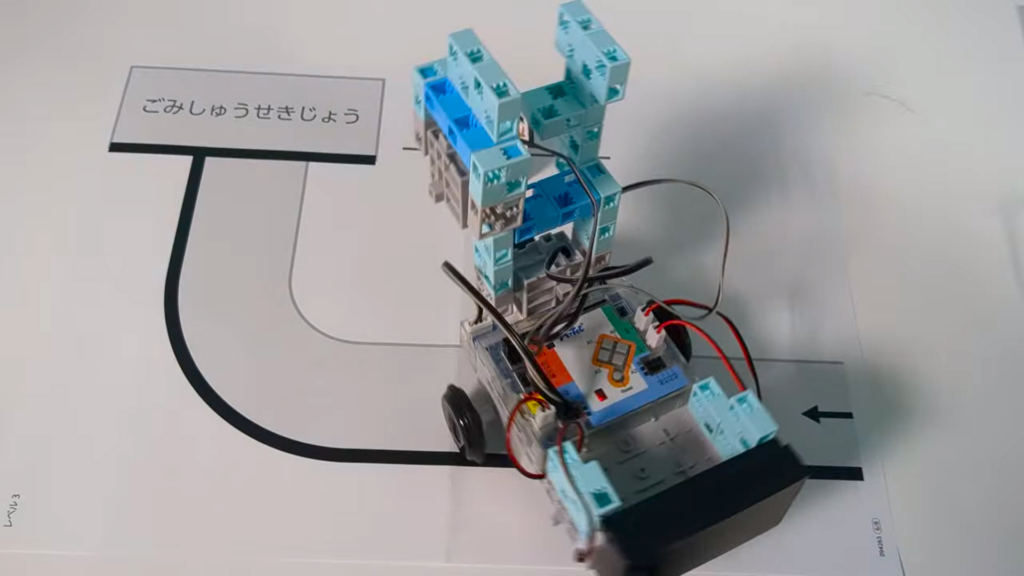
Koseiさんの作品です。 ゴミ収集ロボットをつくりました。 ライントレースできめられた道をすすみながら、赤外線フォトリフレクタでゴミをみつけて、アームで回収する高度なロボットです。 とくに、右に向きをかえてからもとの道 …
Senaさんの作品です。 サーボモーターを加速度センサーで制御して、クレーンのようなロボットをつくりました。 タッチセンサーを押していないときは上下と左右に動かすことができて、 タッチセンサーを押しているときは糸を巻いた …
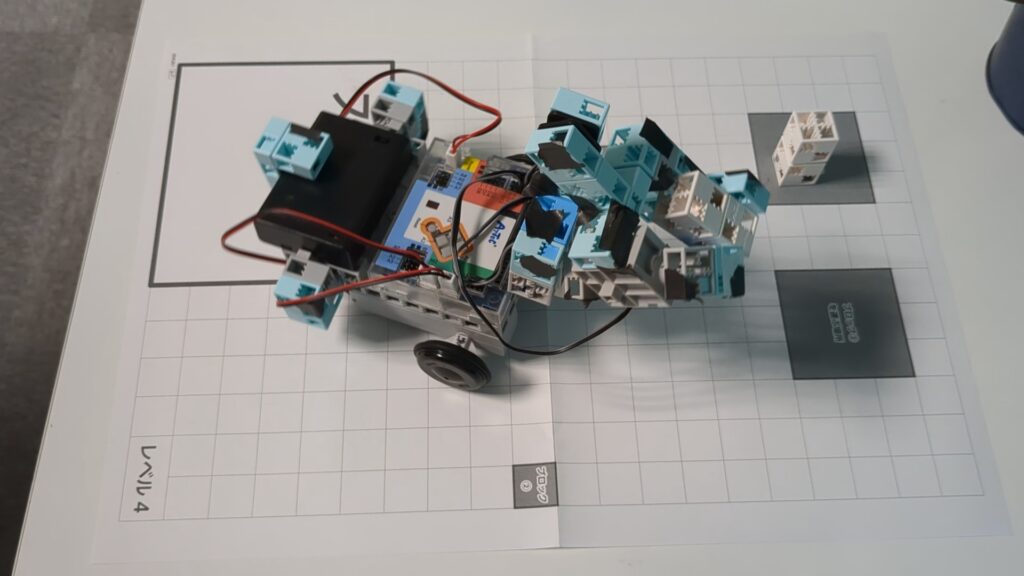
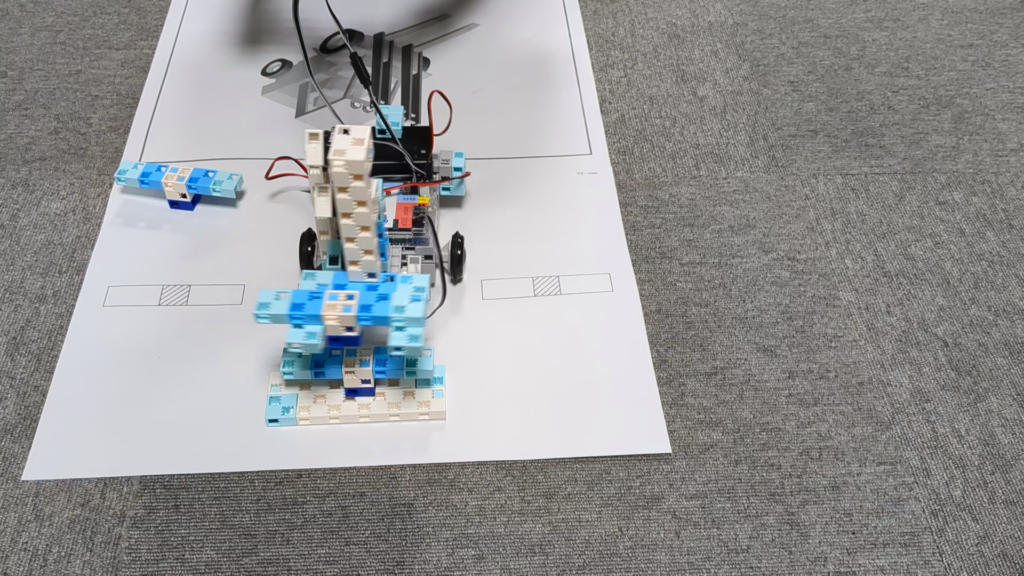
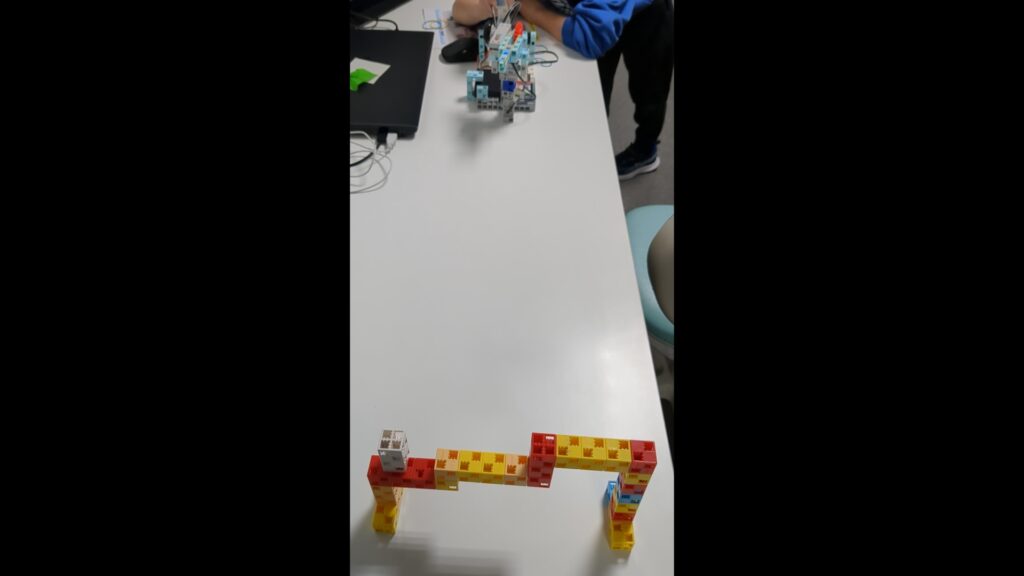
Harutoさんの作品です。 プログラミングで2つのブロックを搬送できるロボットを作りました! 正確に指定された位置に運搬できていますね!
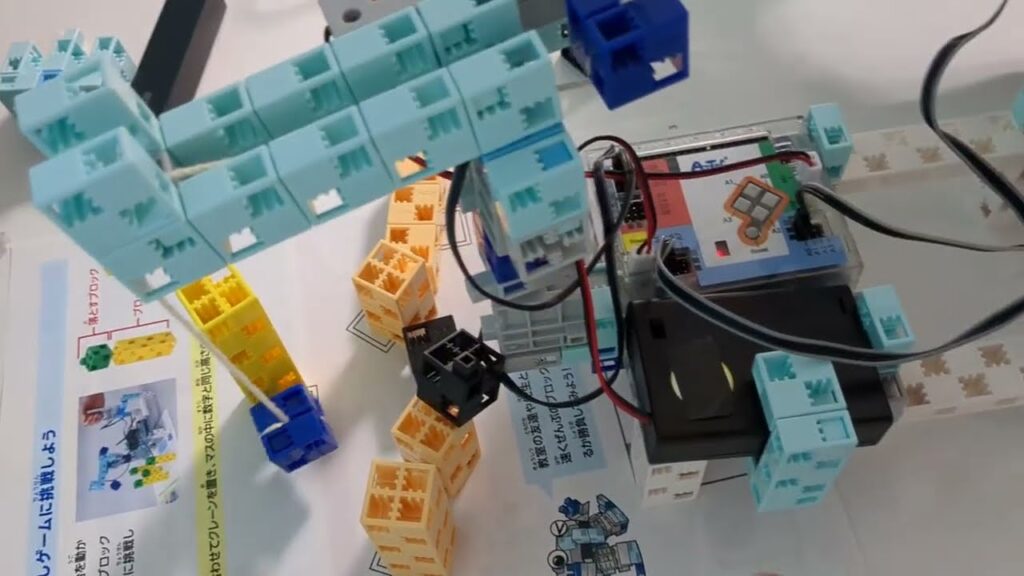
Sosukeさんの作品です。 サーボモーターを加速度センサーで操作して、DCモーターでゴム銃の引き金を回しています。 男のロマンが詰まっていますね!