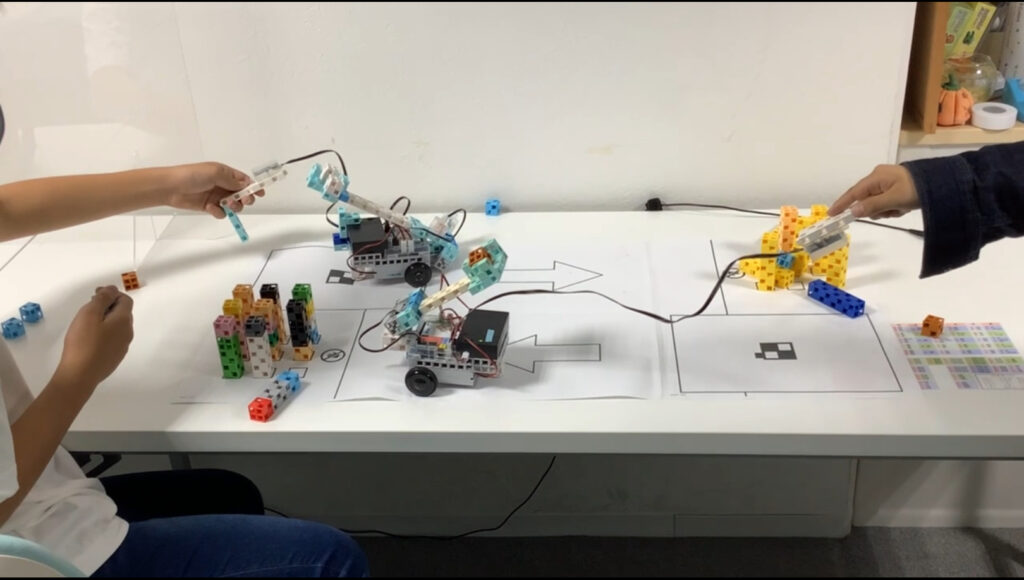
YsTさんの作品です。 前にあるブロックのタワーめがけて、ブロックを投げて倒すロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に倒すと曲がり、大きく振るとブロックを投げ …
営業時間 月~土 10:00~19:00
YsTさんの作品です。 前にあるブロックのタワーめがけて、ブロックを投げて倒すロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に倒すと曲がり、大きく振るとブロックを投げ …
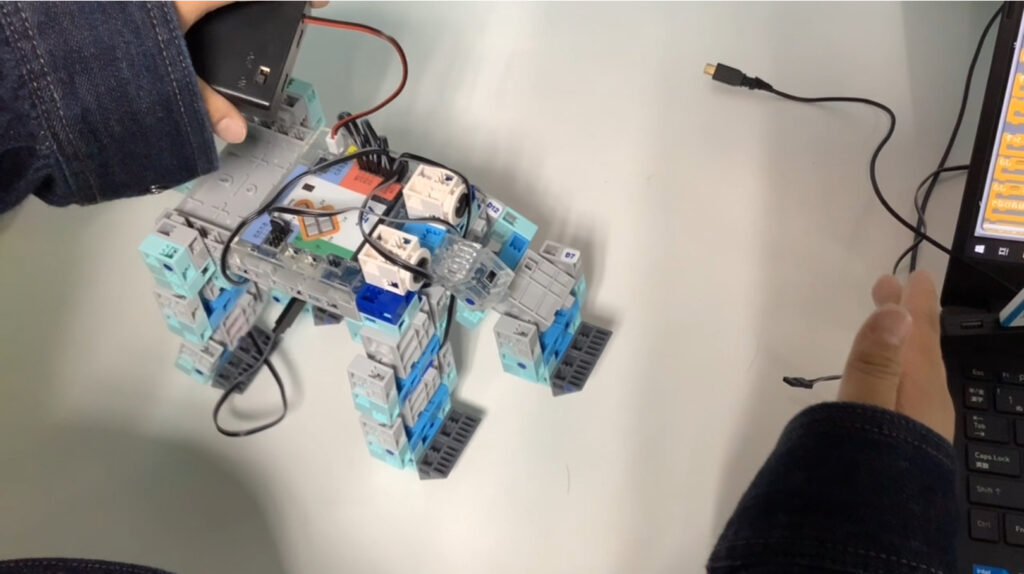
SoTさんの作品です。 4つの足を別々に動かすことができるロボットです。 1本の足に2つ、合計8つのサーボモータを使って、前進するようにプログラムしています。 また、前についた赤外線フォトリレクタに手をかざすと、その場で …
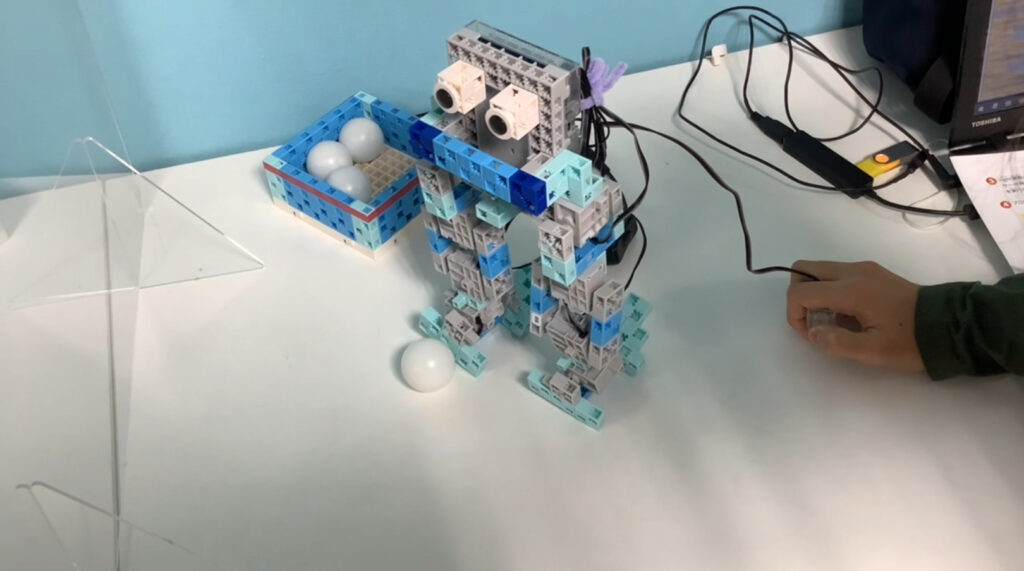
KaHさんの作品です。 人間のように2足で歩くロボットです。 それぞれの足の関節部分にサーボモーターを3つ使っていて、交互に進むだけではなく足首を曲げるように動かすこともできます。 またキックモーションに入るために、コン …
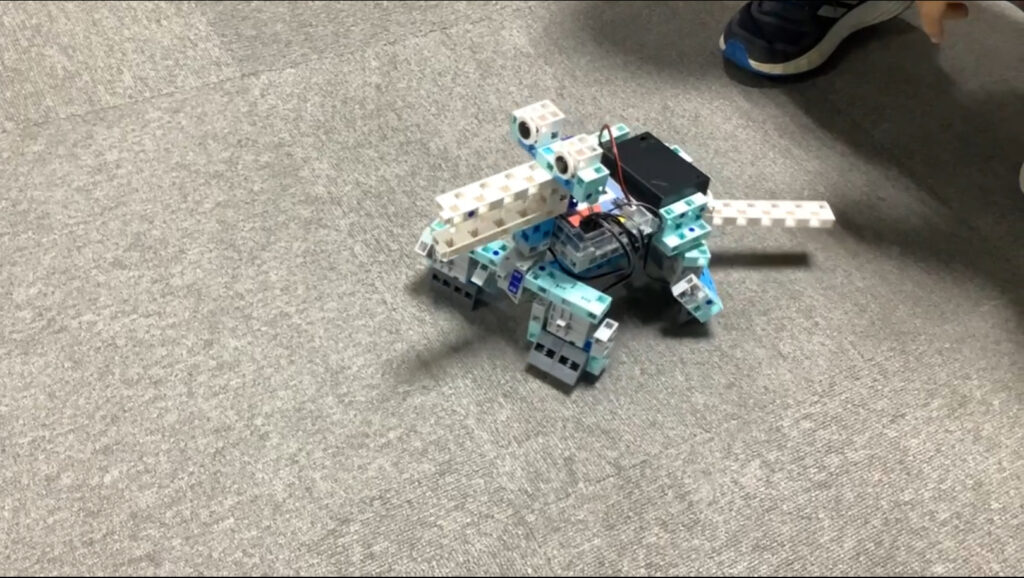
SoTさんの作品です。 4本の足で前に進む、ワニ型の四足歩行ロボットです。 それぞれの足についているサーボモーターを使って、前足と後ろ足の指の部分で地面を押しながら前進します。 胴体にも2つサーボモータがついていて、円弧 …
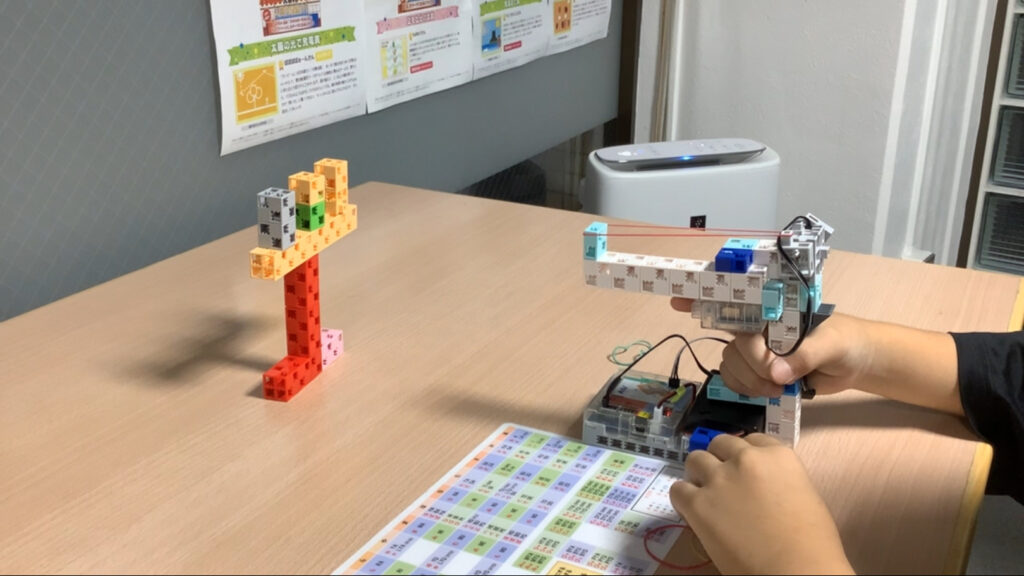
TIさんの作品です。 サーボモータを使った、据え置き型のシューティングロボットです。 まず輪ゴムを先端とサーボモータの先にセットします。 引き金であるタッチセンサーを押すと、サーボモータが前に回り、輪ゴムが飛ばされる仕組 …
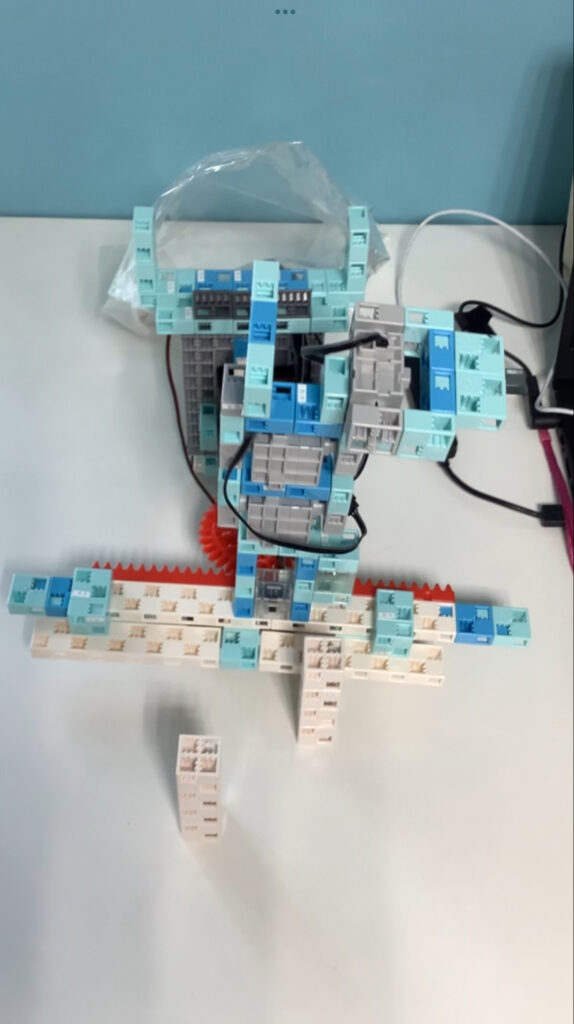
RMさんの作品です。 スキャン機能が付いているアームロボットです。 まず、アームの下についている赤外線フォトリフレクタが左右に往復し、ブロックを探します。 ブロックを見つけたらアームで掴み、後ろの袋に入れ、前に進んで同じ …
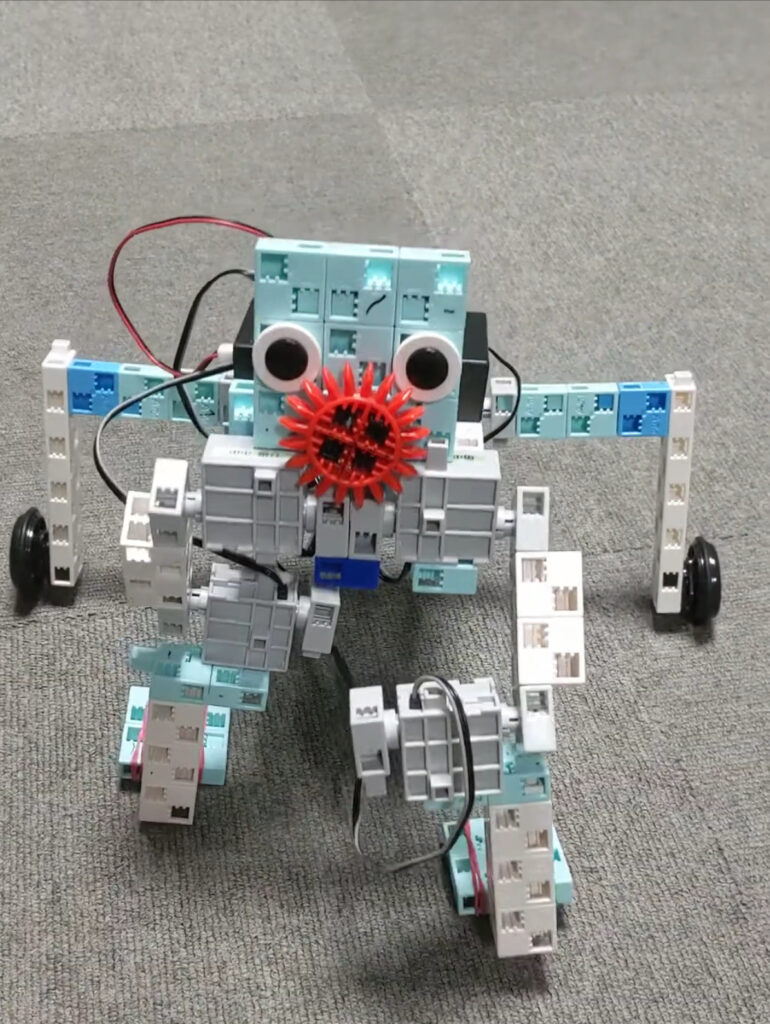
YTさんの作品です。 オリジナルの二足歩行ロボットです。 前足は、4つのサーボモータで動いています。 それぞれのサーボモータは、肩の役割と、ひじの役割に分かれています。 後ろ足は、タイヤを使っていて、体を支えながら進みま …
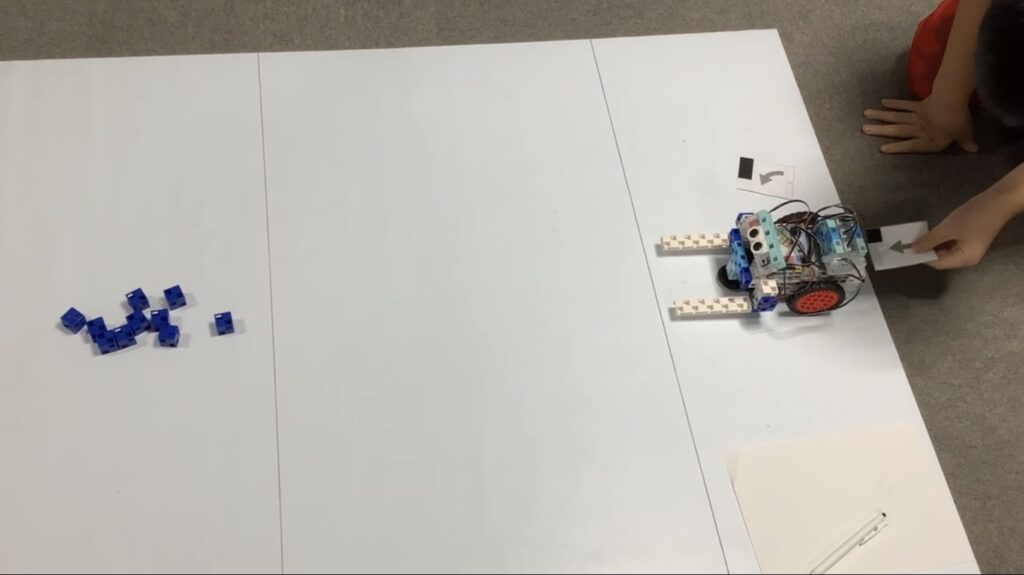
BHさんの作品です。 バーコードがついているカードを読み込ませて、動きをプログラミングさせるロボットです。 3つの赤外線フォトリフレクタを使って、カードについているバーコードを読み込むことで、カードに書かれた動作のとおり …
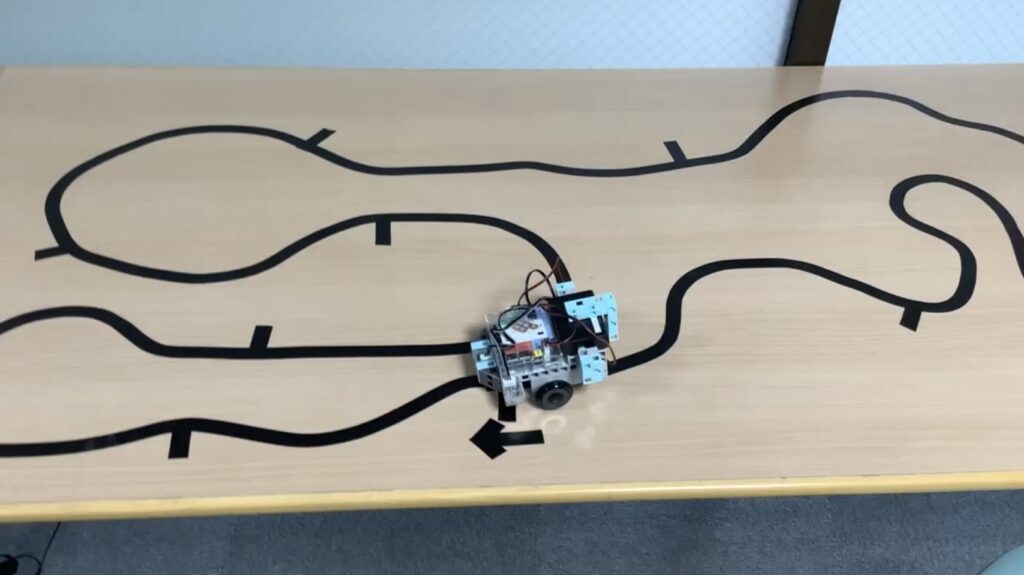
SPさんの作品です。 黒い線に沿って動く自動車型ロボットです。 ロボットの下に搭載されている赤外線フォトリフレクタで黒色かどうかを判別し、その色の線に沿って動きます。 更にもう一つの赤外線フォトリフレクタで、内側の黒い線 …
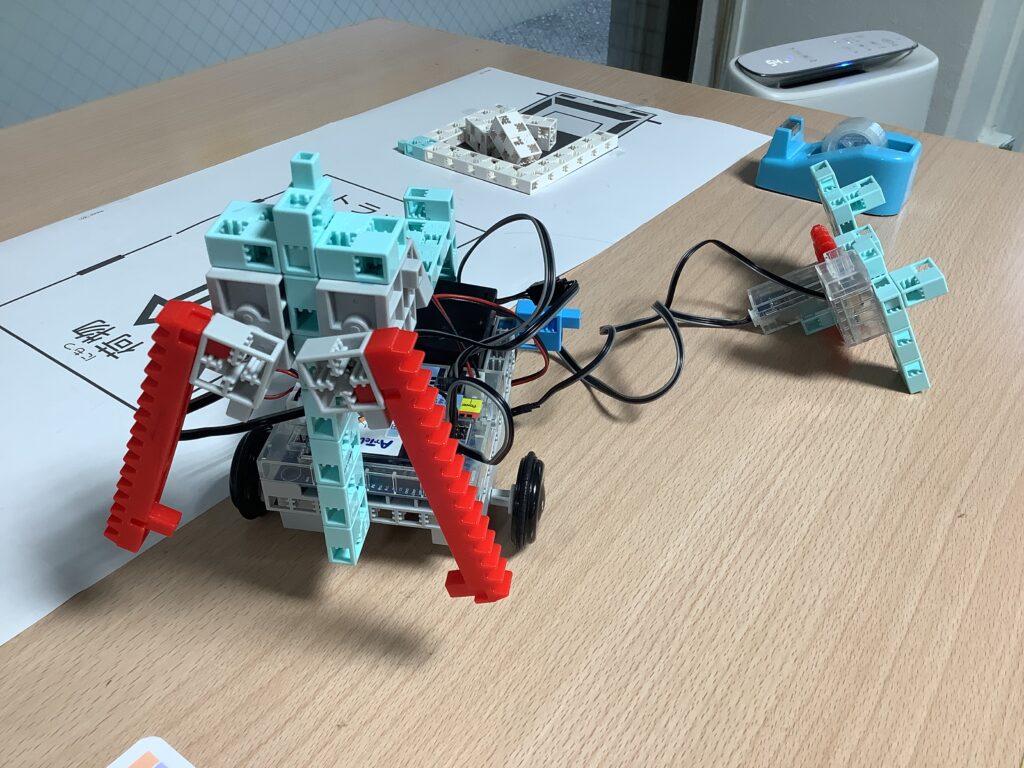
YsTさんの作品です。 赤いラックギア2本で荷物を掴み、運ぶロボットです。 コントローラには加速度センサーとタッチセンサーをつけています。コントローラを動かすことでロボットが前後左右に動き、タッチセンサーを押すことでサー …