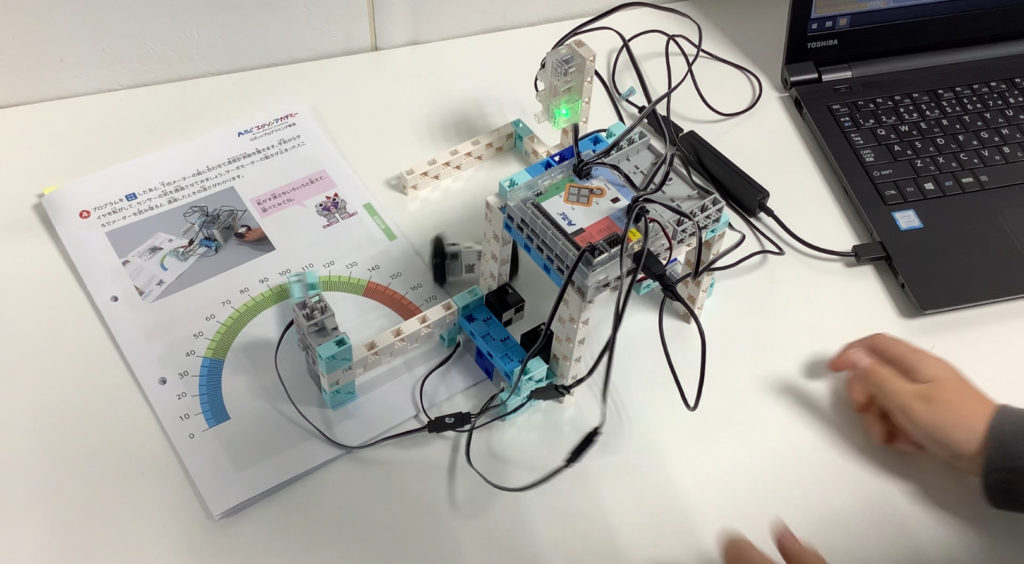
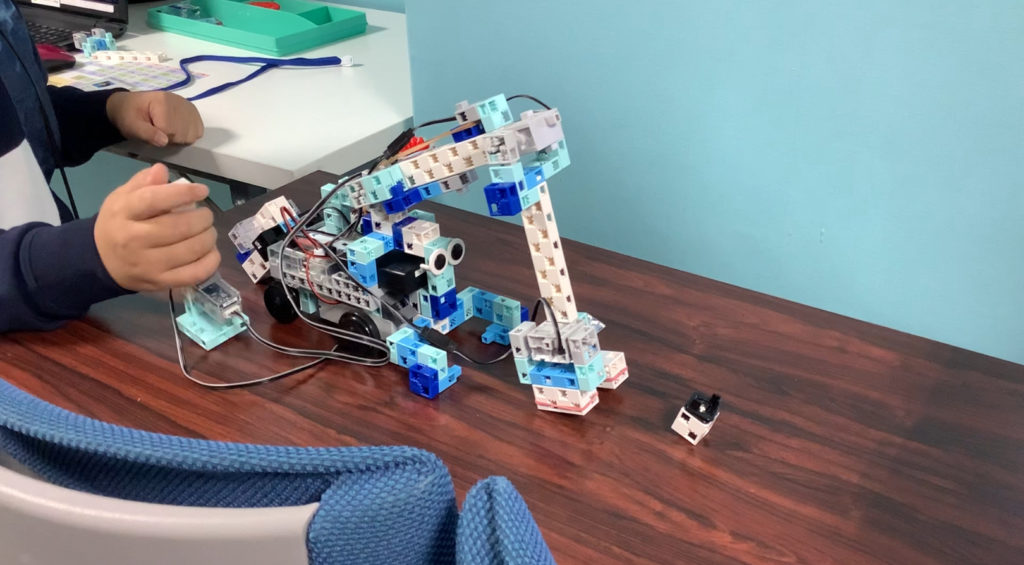
BHさんの作品です。 赤外線センサーを使って、通り抜けるものの速さを測定できるロボットです! 以前に作った改札機を応用して作りました!
営業時間 月~土 10:00~19:00
BHさんの作品です。 赤外線センサーを使って、通り抜けるものの速さを測定できるロボットです! 以前に作った改札機を応用して作りました!
KaSさんの作品です。 ロボットはランダムに手を動かし、ゴールを守っています。 ゴールすると音と光の演出があり、PKにピッタリなロボットです!

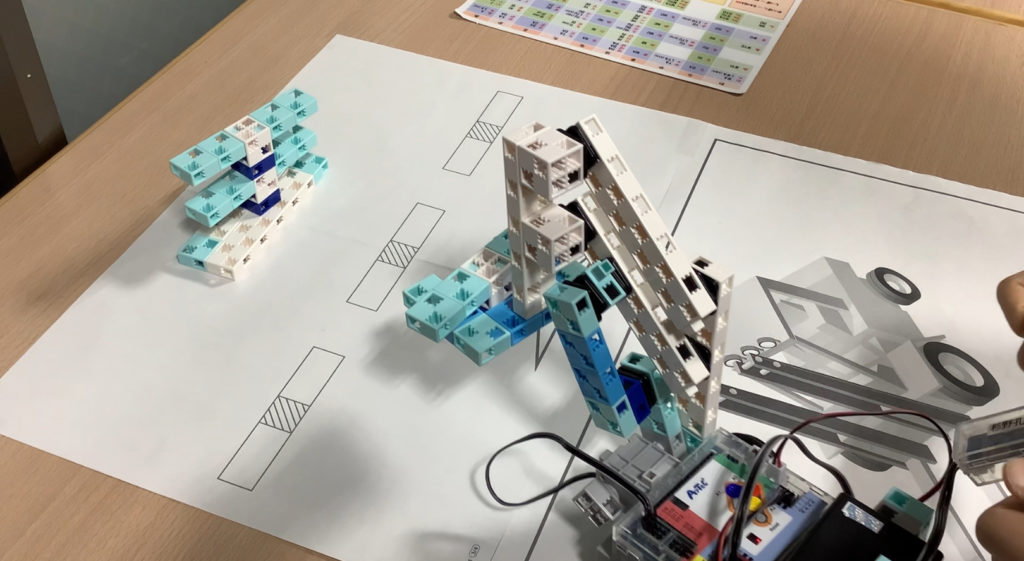
RTさんの作品です。 ブロックを別の場所に運ぶロボットを、一気に2つのブロックを運べるロボットに改造しました! 二つのブロックが並んだままアームで持ち上げられるように調整しています! RTさんの工夫が凝らされたロボットで …
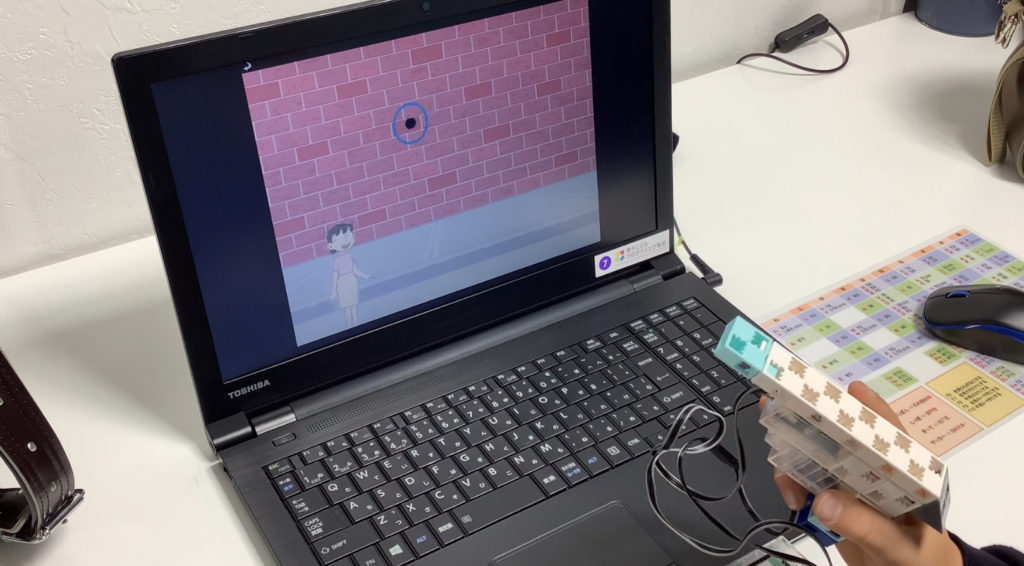
DNさんの作品です。 PCの画面上のポインタを動かし、的を射つゲームです。 鉄砲の傾きをセンサーで読み取り、タッチセンサーで弾を発射することができます。 PCと実際のロボットが連動した作品です!
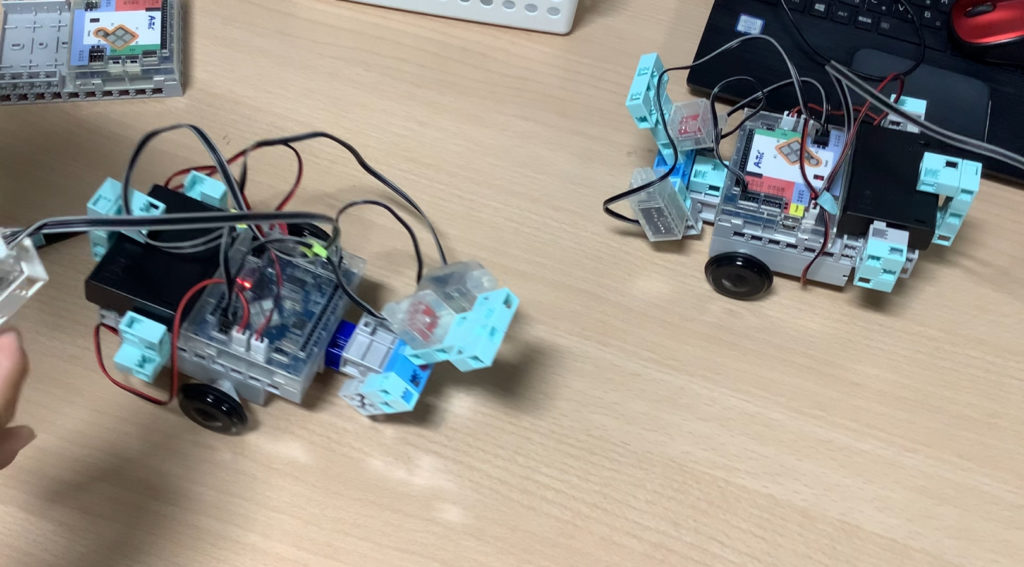
KaHさんの作品です。 加速度センサーで操作できる2体のロボットを作りました。 前後左右に移動したり、前面のアームで相手をタッチセンサーを叩くと、相手のロボットが止まります。
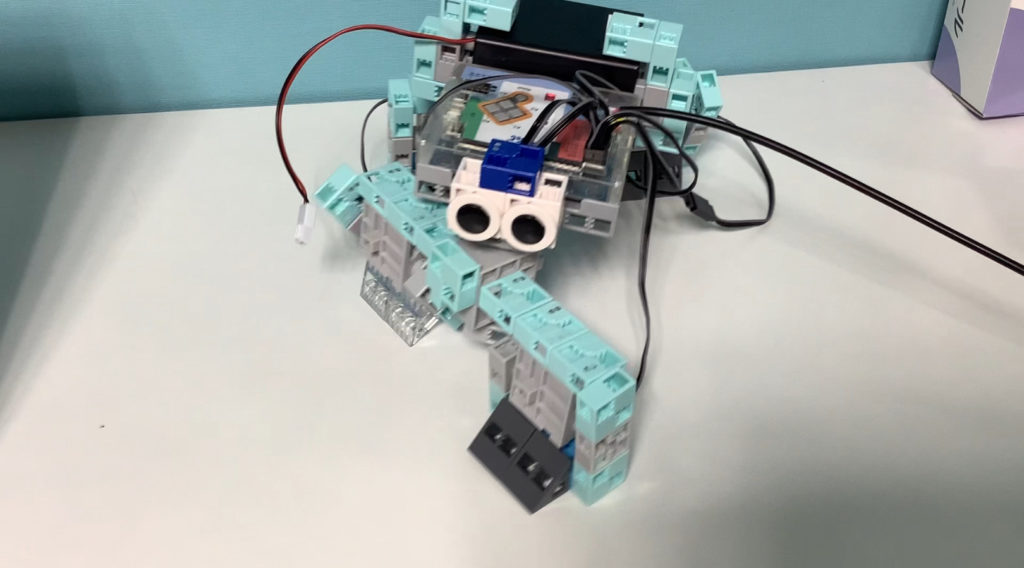
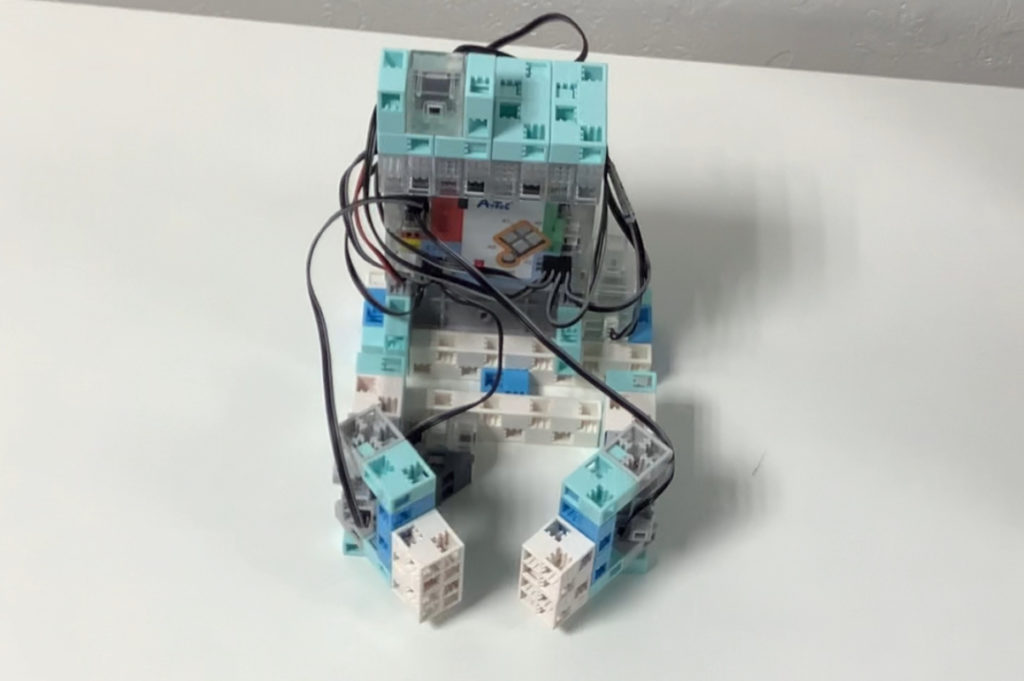
TaKさんの作品です。 四足歩行の哺乳動物のように、右前足と左後ろ足、左前足と右後ろ足が同時に動いて歩行します! モーターを動かす角度の調整が大変でしたが、苦労した甲斐あって迫力のあるロボットができました!
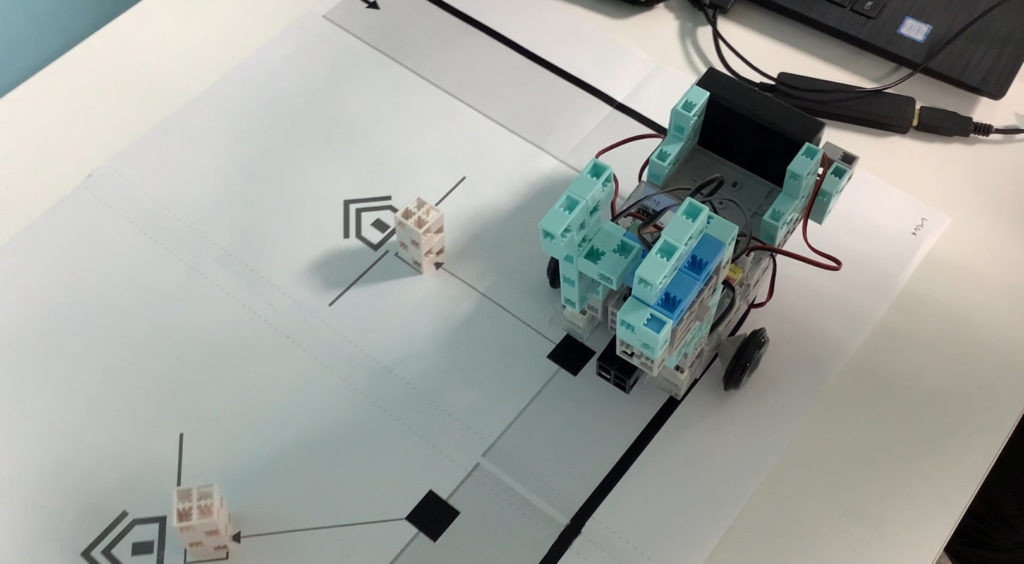
KaHさんの作品です。 黒い線に沿って移動し、黒い正方形のところで立ち止まってブロックを回収できるロボットです。 赤外線センサーを使って黒い線や黒い正方形を感知して動いているので、コントローラーなしでブロックを回収するこ …
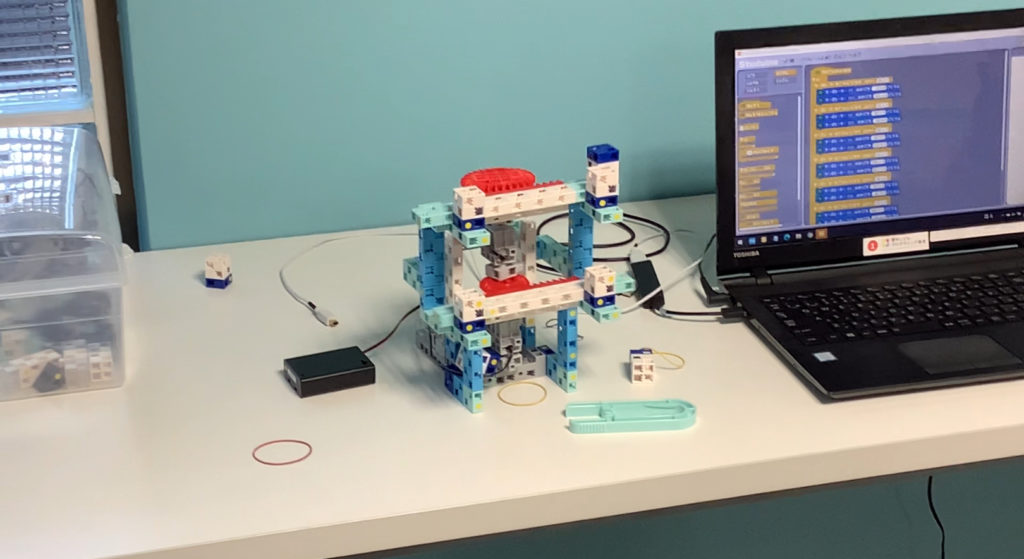
KoSさんの作品です。 リフトでブロックを積み上げることができるロボットです。 加速度センサーを使って前後左右に移動させ、タッチセンサーのボタンでブロックを持ち上げます。 KoSさんはロボットを器用に操作して、ブロックを …
AIさんの作品です。 モーターと歯車を使って的を左右に動かすことができるロボットです。 これを使って輪ゴム鉄砲がより面白くなります! 的はランダムに動くようにプログラムされているのでなかなか的に当てるのは難しいです。 的 …
HAさんのオリジナル作品です。 ブロックをアームで掴んで運ぶことができるロボットです。 加速度センサーを使ったコントローラーでロボットを操作し、ブロックをアームで掴みます。 アームの先端に赤い輪ゴムをかけて滑り止めにする …