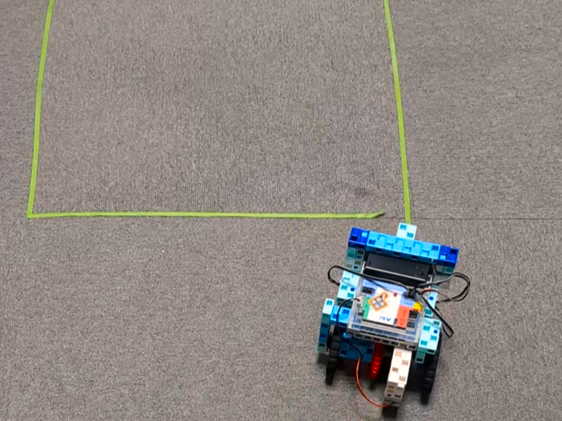
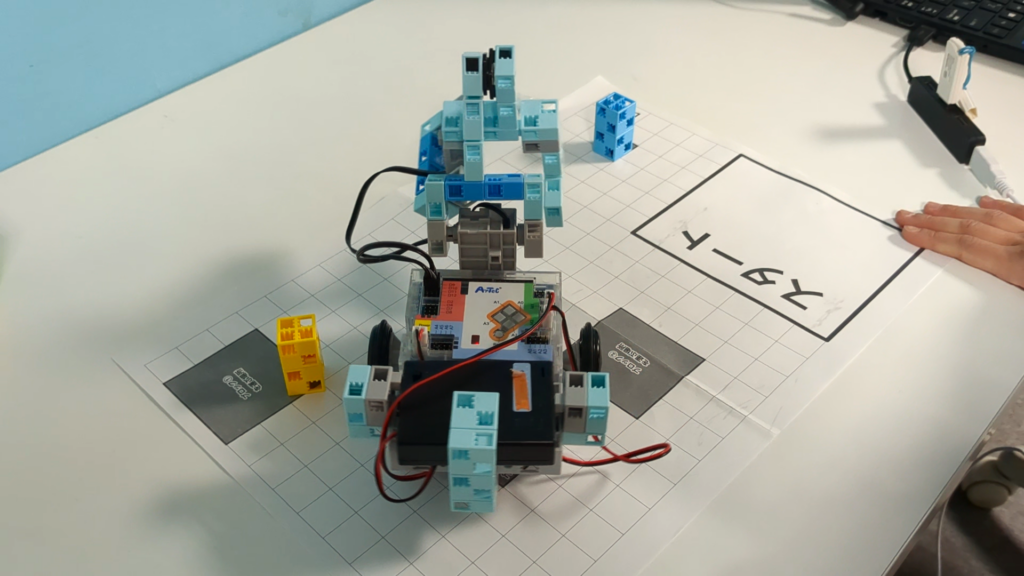
Sotaさんの作品です。 ボタンを押した回数だけ前進するロボットを作りました。 ロータリーエンコーダーをつかって、タイヤの回転した回数を正確に数えています。 ぴったり止めれるかはボタンの調整しだいです!!🚙
営業時間 月~土 10:00~19:00
Sotaさんの作品です。 ボタンを押した回数だけ前進するロボットを作りました。 ロータリーエンコーダーをつかって、タイヤの回転した回数を正確に数えています。 ぴったり止めれるかはボタンの調整しだいです!!🚙

Yukaさんの作品です。 犬のプルバックカーを作りました。 TinkerCADというソフトでデザインして、3Dプリンターで出力しました。 かわいらしい見た目に反して、超高速で走っていきます!!
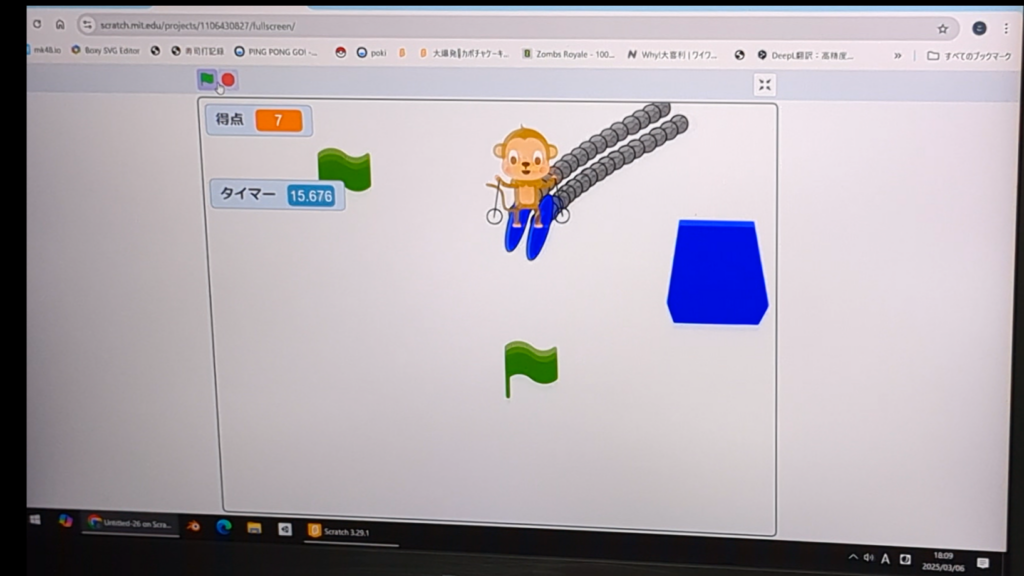
Rikutoさんの作品です。 スキーで滑るゲームを作りました。 時間内にどれだけ旗をとれるか競います。 スキーの滑っていく動きやジャンプ台など、いろいろな点でこだわりがあります! ポイントを競って、レッツスキージャンプ⛷ …

Harutoさんの作品です。 某キャラクターのプレートをつくりました。 知人に頼まれたため制作したそうです👍

2023年3月9日日曜日、プログラミング体験教室の様子です。 まずはScratchで海の生きものを作ります。プログラミングで海の中を泳いでいるようにしました。参加者のお二人とも最初はたどたどしくマウスで描いていたのに、あ …
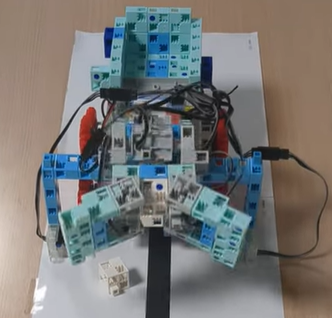
Sotaさんの作品です。黒い線に沿って走るライントレースロボットに、センサーで落ちているブロックを検出し、回収するアームをそなえた、ブロック搬送ロボットです。 落ちているブロックを安定して検出することができずに苦労しまし …
2025年2月のマイクラ部を開催しました。 参加者全員が同じワールドでマイクラを楽しみます。今回のお題は「90分間で鉱石をたくさん集めた人の勝ち!」 もちろん、鉱石ごとに得点が割り振られていて、金やダイヤモンド、エメラル …
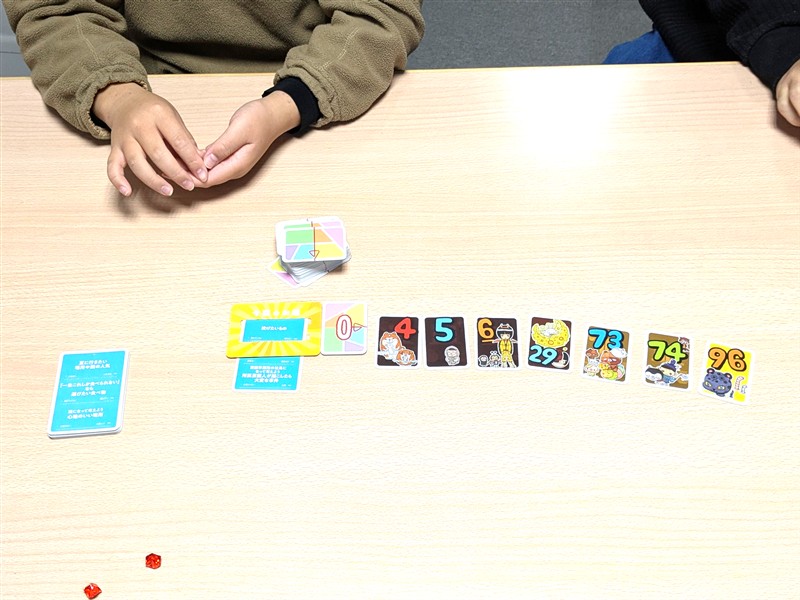
2月のテーブルゲーム部は、itoを始めに、Sanfan2などのテーブルゲームで遊びました。 itoはお題の数を言葉であらわすゲームです。そして、その言葉を数字のとおりに並べられるかを楽しみます。勝ち負けではなくみんなで達 …

Yu.Iさんの作品です。 UnityとAI(ChatGPT)をつかってお絵かきアプリを制作。シンプルな絵日記を目指して作りました。 色を変えてマウスで絵を書いたり、色を塗ったり、消しゴムで一部分を消すこともできます。 画 …
Ri.Sさんの作品です。 搬送ロボットを作りました。 2つのブロックをそれぞれ決められた場所に運ぶロボットです。 なんども調整を繰り返してやっと完成しました!! 回転と移動を駆使しして、ブロックを運んでくれます🤖