
yutaroさんの作品です。 Scratchで音のでる作品を作りました。 人や楽器やスピーカーをクリックするといろんな音や音楽を奏でることができます!! レッツミュージック♪♬
営業時間 月~土 10:00~19:00
yutaroさんの作品です。 Scratchで音のでる作品を作りました。 人や楽器やスピーカーをクリックするといろんな音や音楽を奏でることができます!! レッツミュージック♪♬
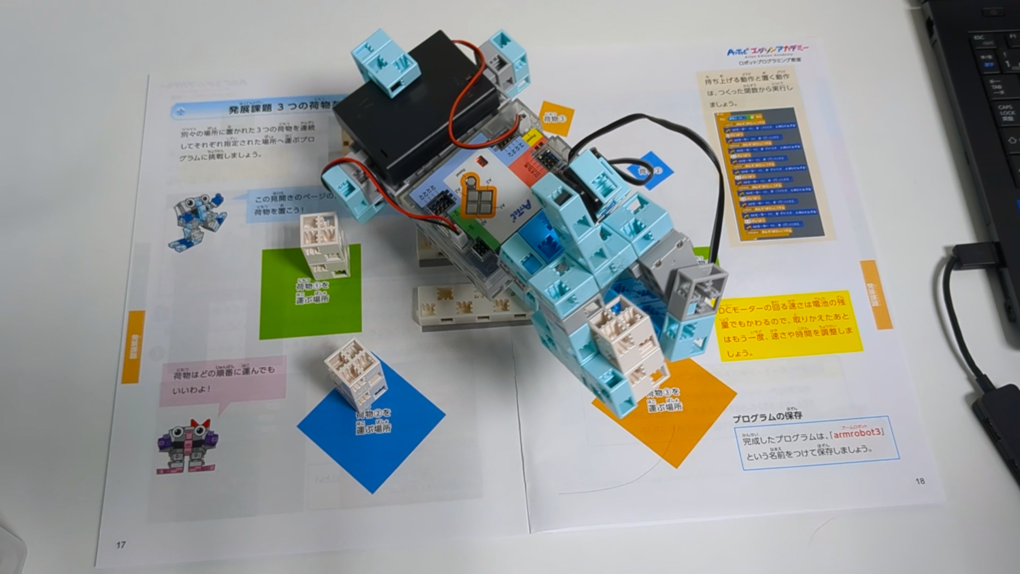
Sosukeさんの作品です。 ブロック搬送ロボットを作りました。 何回も位置調整に苦労しましたが、頑張って成功しました!! いろんな位置のブロックを巧みに運んでいきます🦾🤖
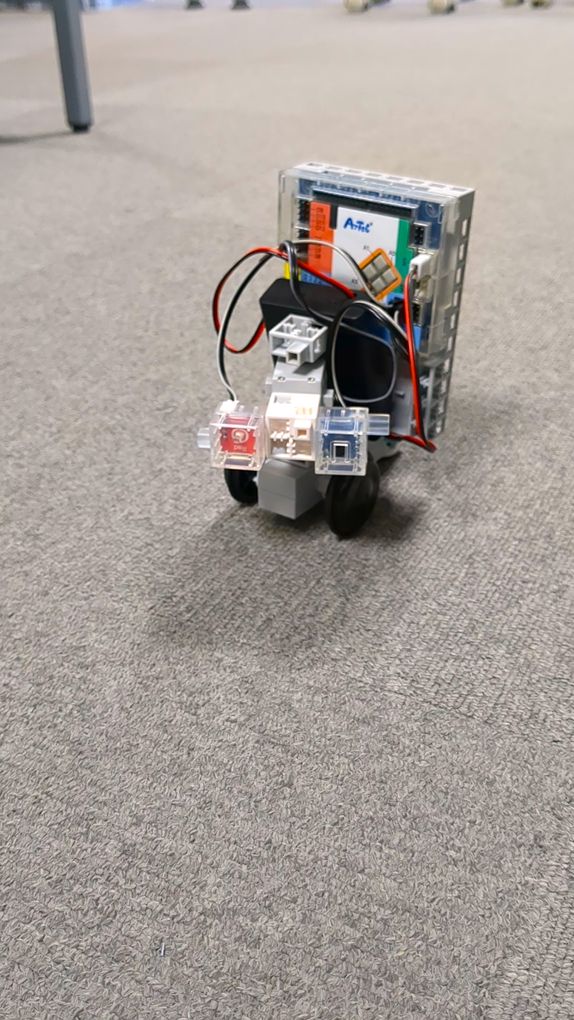
Harutoさんの作品です。 ロボットコース、はじめの第一歩です! LED、ブザー、DCモーター、サーボモーターを簡単なプログラミングで動かす、ロボットプログラミングの基本を学びました。 しっかり走って動いて素晴らしいで …
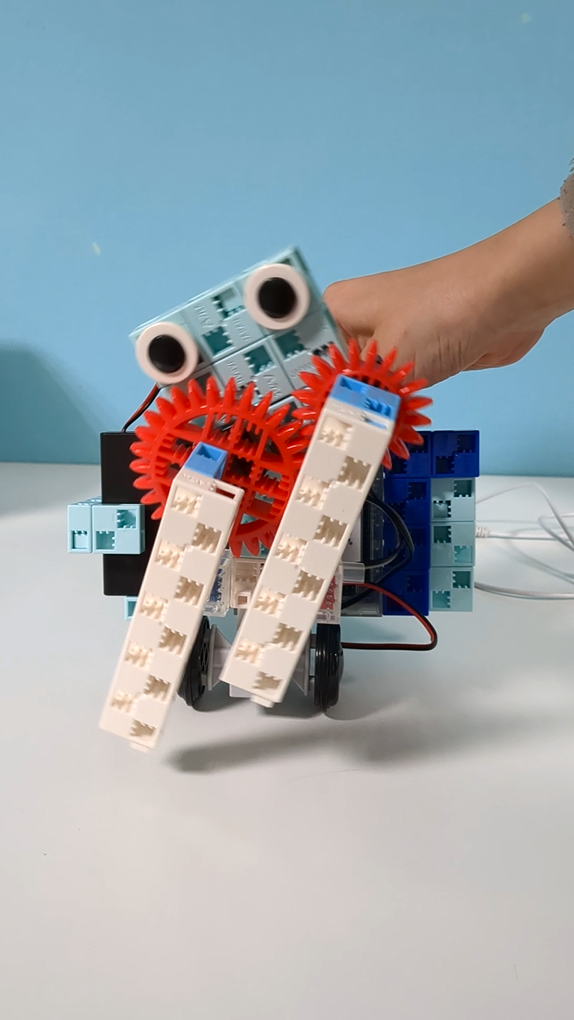
Senaさんの作品です。 はじめてのロボットプログラミング!! LED、ブザー、DCモーター、サーボモーターをつかって、ロボットプログラミングの基本を学びました。 最後はオリジナルロボットに進化!カマキリのような腕を持つ …

Mizukiさんの作品です。 TinkerCADでゲームのキャラクターを作りました。 とても上手に作っていて、いまにも動き出しそうです!!
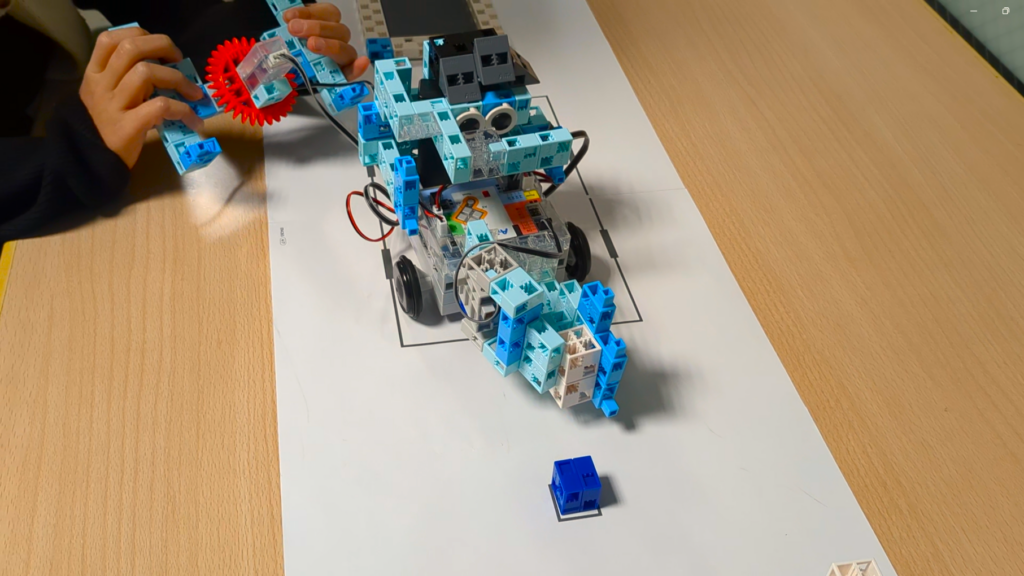
Riruさんの作品です。 ブロック運搬ロボを作りました。 トラックの荷台に3つのブロックを運んで乗せるロボットです。 ちょっと失敗もしたけれど、荷台に乗せることができました!!

Risaさんの作品です。 ゲームのキャラクターをBlenderでモデリングして出力しました。 非常に良い出来栄えで、かわいいです❤
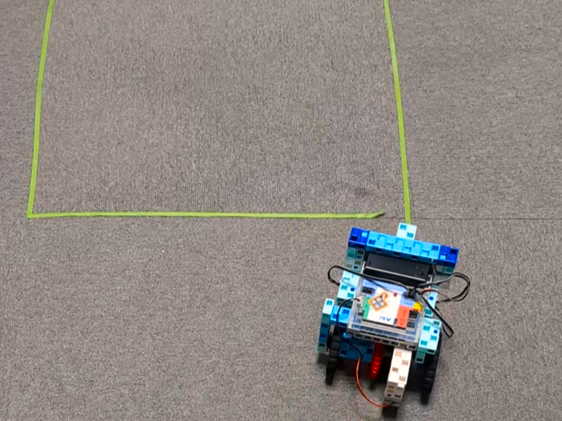
Sotaさんの作品です。 ボタンを押した回数だけ前進するロボットを作りました。 ロータリーエンコーダーをつかって、タイヤの回転した回数を正確に数えています。 ぴったり止めれるかはボタンの調整しだいです!!🚙

Yukaさんの作品です。 犬のプルバックカーを作りました。 TinkerCADというソフトでデザインして、3Dプリンターで出力しました。 かわいらしい見た目に反して、超高速で走っていきます!!
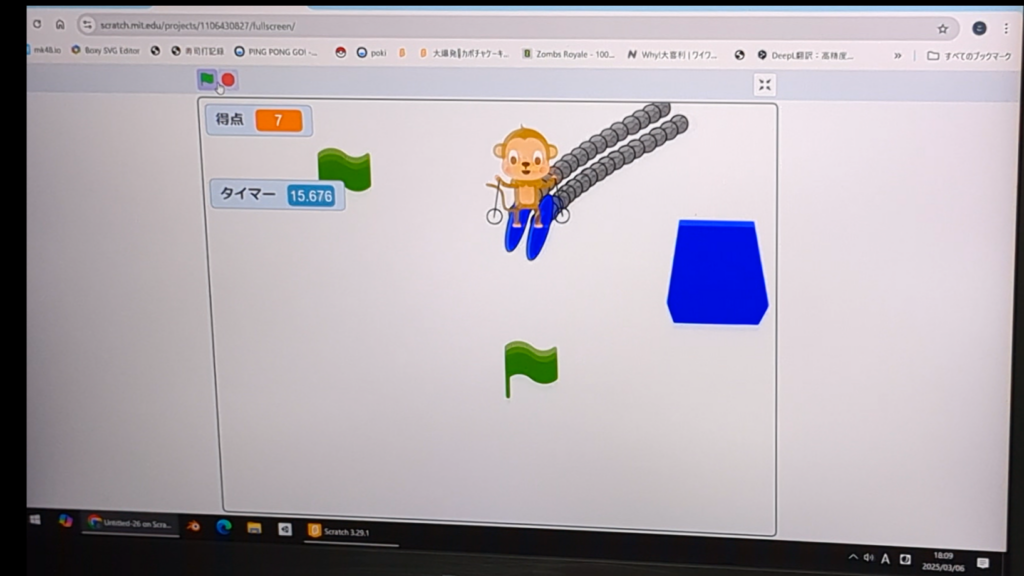
Rikutoさんの作品です。 スキーで滑るゲームを作りました。 時間内にどれだけ旗をとれるか競います。 スキーの滑っていく動きやジャンプ台など、いろいろな点でこだわりがあります! ポイントを競って、レッツスキージャンプ⛷ …