RMさんの作品です。 荷物を下から持ち上げて運ぶ、フォークリフト型のロボットです。 コントローラには加速度センサーとタッチセンサーをつけています。コントローラを動かすことでロボットが前後左右に動き、タッチセンサーを押すこ …
営業時間 月~土 10:00~19:00
RMさんの作品です。 荷物を下から持ち上げて運ぶ、フォークリフト型のロボットです。 コントローラには加速度センサーとタッチセンサーをつけています。コントローラを動かすことでロボットが前後左右に動き、タッチセンサーを押すこ …
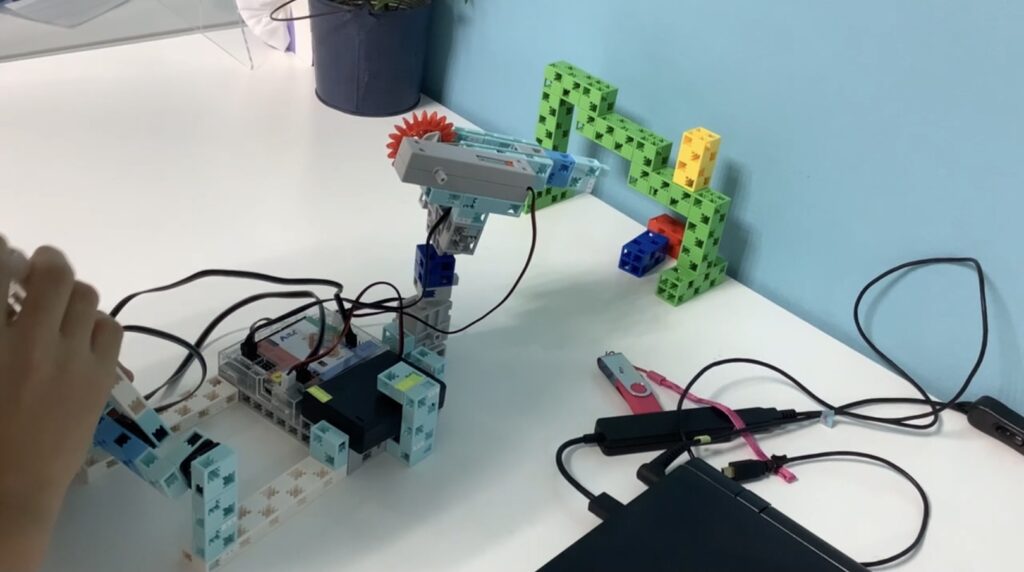
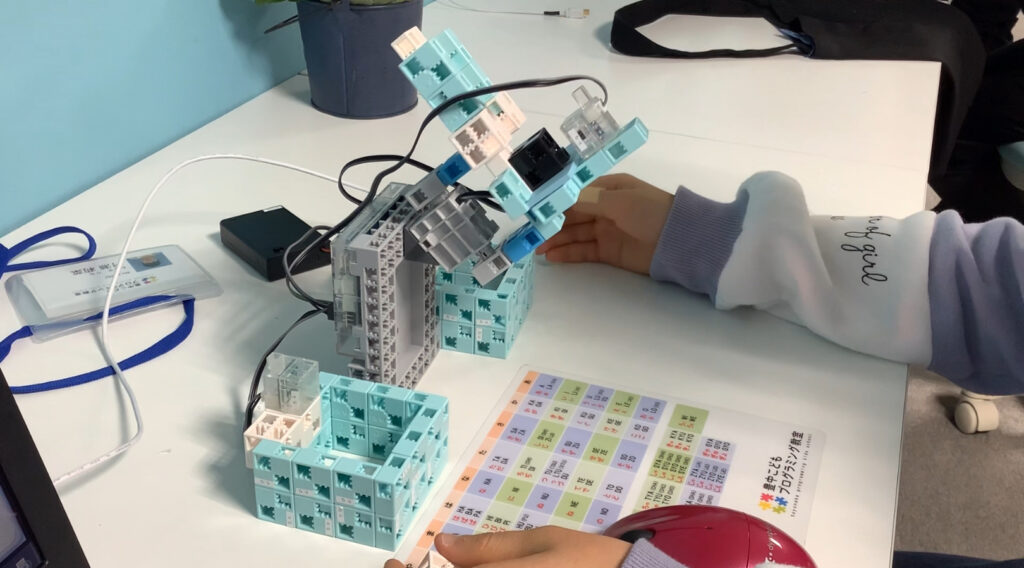
RMさんの作品です。 手元のコントローラで角度を決めて、紙飛行機を飛ばすロボットです。 コントローラには加速度センサーを使っていて、前後左右に動かすことで、飛ばす向きを決めることができます。 タッチセンサーを押すと歯車が …
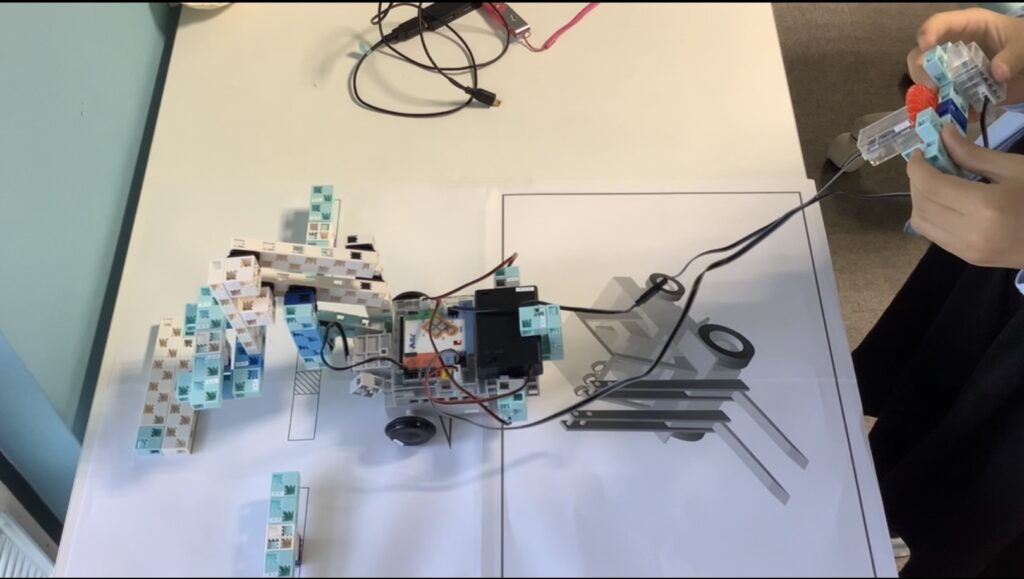
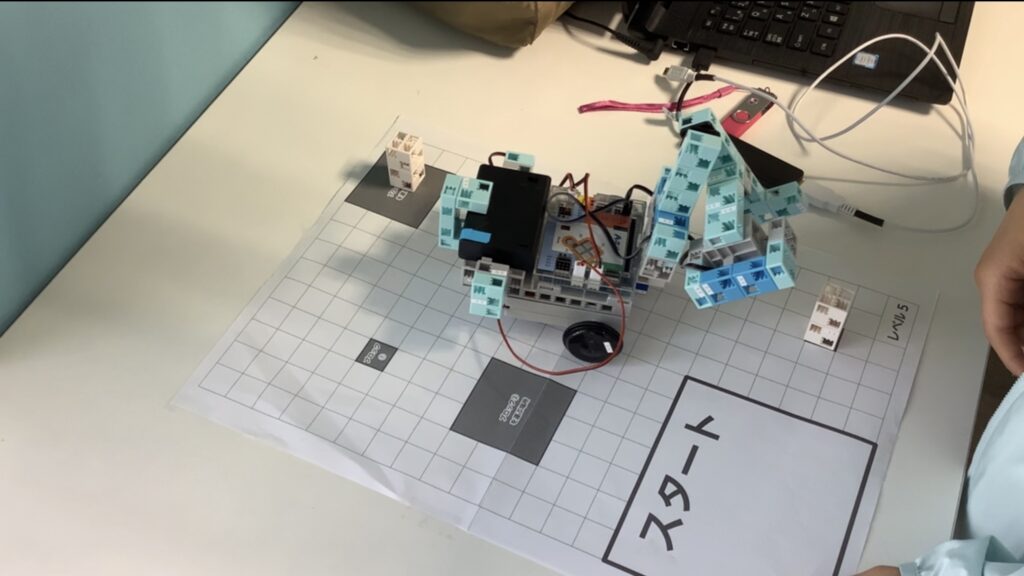
RMさんの作品です。 ブロックをアームにセットして倒し、ブロックのタワーを崩す自動車ロボットです。 コントローラには加速度センサーを使っています。前に倒すと前進、後ろに倒すと後進、左右に傾けると曲がり、大きく振るとアーム …
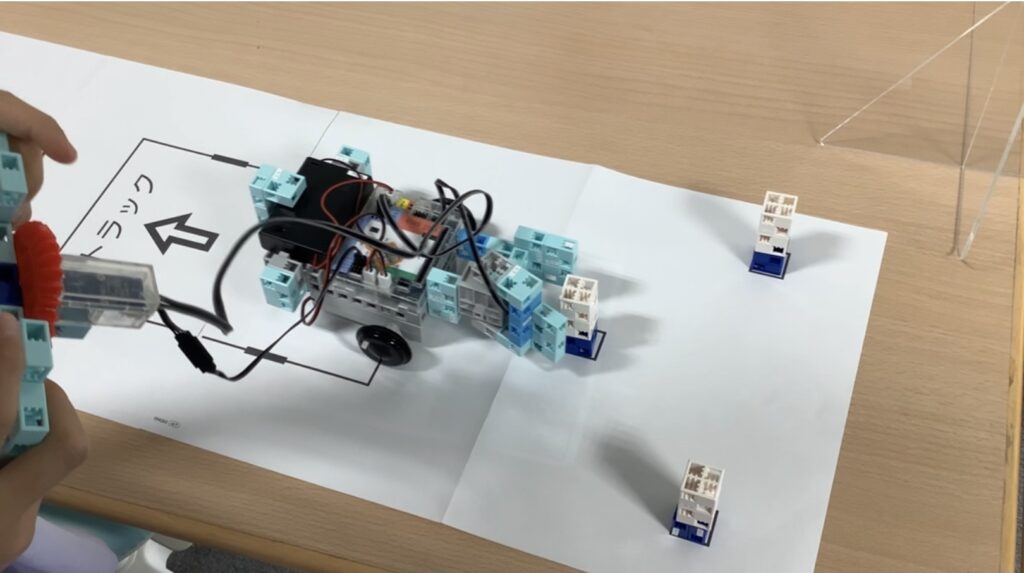
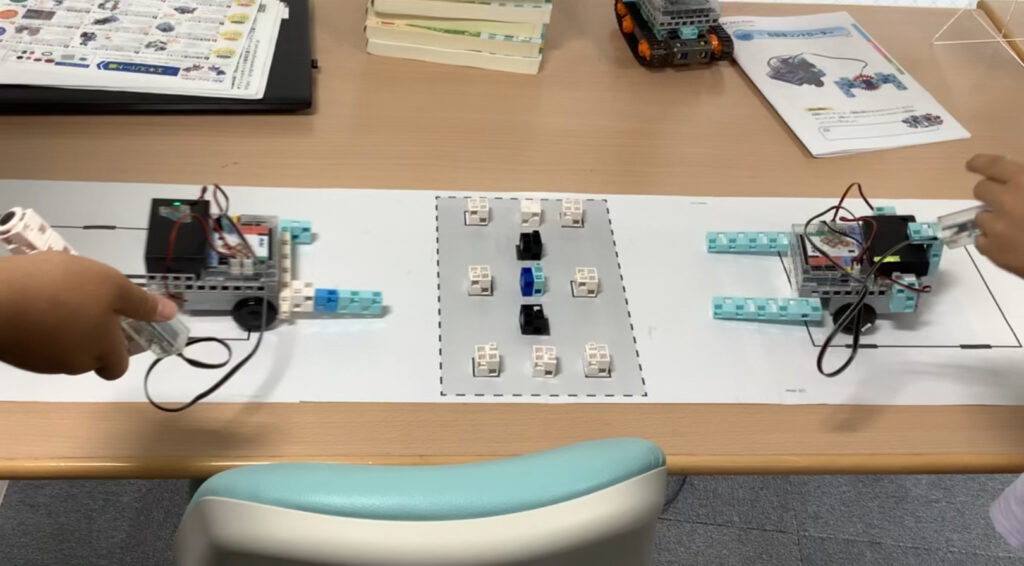
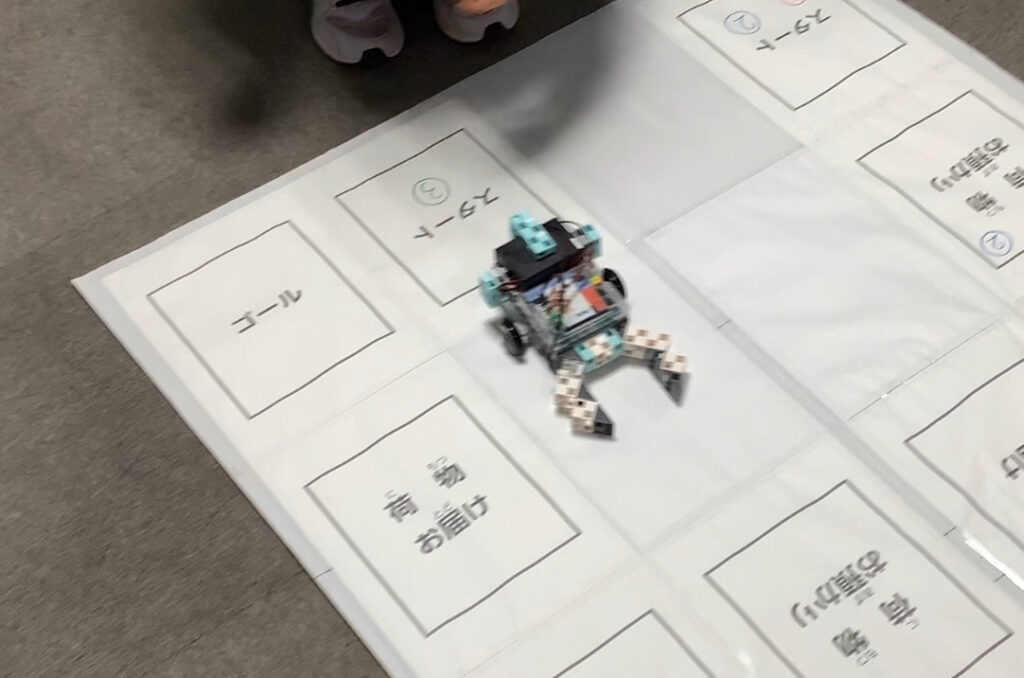
RMさんの作品です。 青い荷台の上にある白い荷物を掴んで運ぶロボットです。 加速度センサーがコントローラとなっており、ロボットを前後左右に移動することができます。 またタッチセンサーを押すことで、荷物を掴むことができます …
RMさんの作品です。 加速度センサーを使ったコントローラーで操作する自動車ロボットです。 加速度センサーは傾きを感知するので、前に傾けるとロボットが前に進み、後ろに傾けると後ろに進むように、傾きに合わせて動くようにプログ …
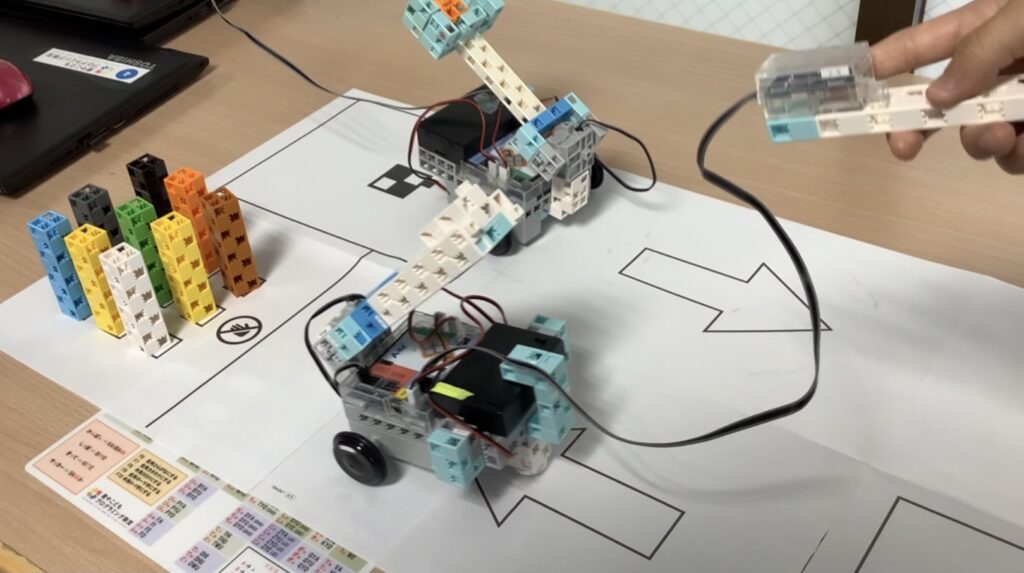
RMさんの作品です。 ブロックを持ち運びし、指定の場所に置くロボットです。 ロボットを回転させ、前後左右に動かす役目はDCモーターが果たしています。 サーボモータは2つ使うことで、ブロックを掴む動作と上げ下げする動作を可 …

RMさんの作品です。 このロボットは、ブロックを特定の場所に運ぶことができます。 DCモーターでロボット自身が回転し、ブロックを掴む場所、放す場所に移動します。 アームにはサーボモーターを二つ使い、それぞれアームを上げ下 …
RMさんの作品です。 ブロックの色をもとに二つの箱に分別することができるロボットです。 ブロックの色が白か黒かは赤外線フォトリレクタで判別しています。 赤外線フォトリレクタは、赤外線を照射してその反射光を受け取るセンサー …
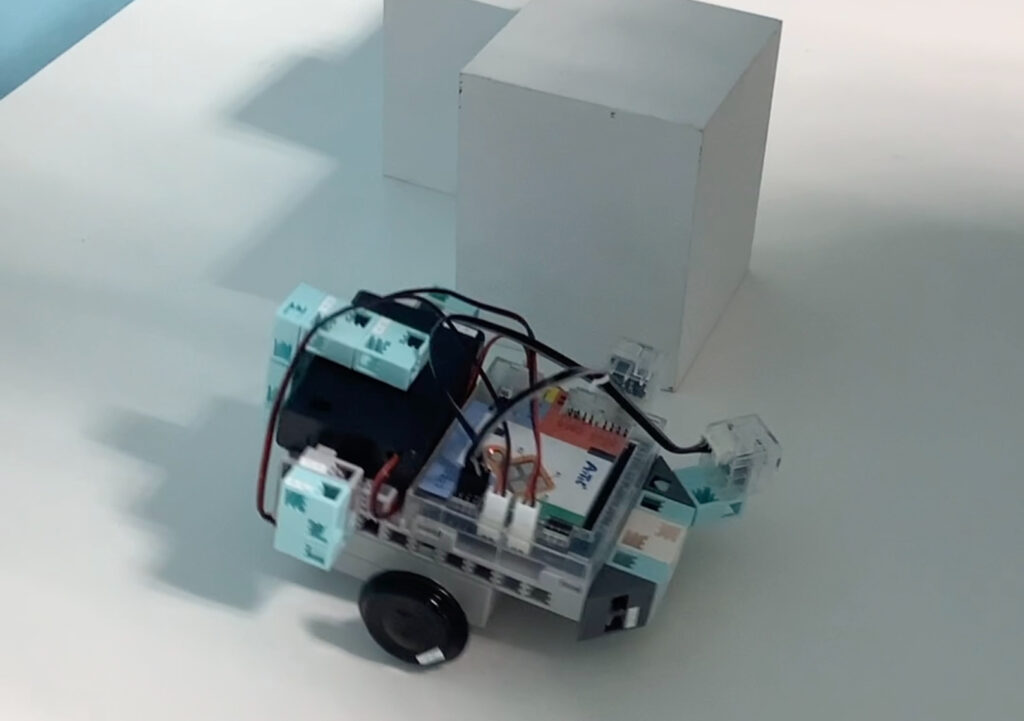
RMさんの作品です。 このロボットは自動で壁を認識して壁にぶつからないように走ることができます。 赤外線フォトリレクタが2つ付いていています。 ロボットの左側の赤外線フォトリレクタでは壁に近づきすぎたり遠すぎたりしないよ …
RMさんの作品です。 ブロックを指定の場所に届けることができるロボットです。 荷物預かりという場所で止まり、荷物がロボットの目の前に置かれるまで待ちます。 荷物はロボットの赤外線フォトリフレクターで検知され、お届け場所ま …