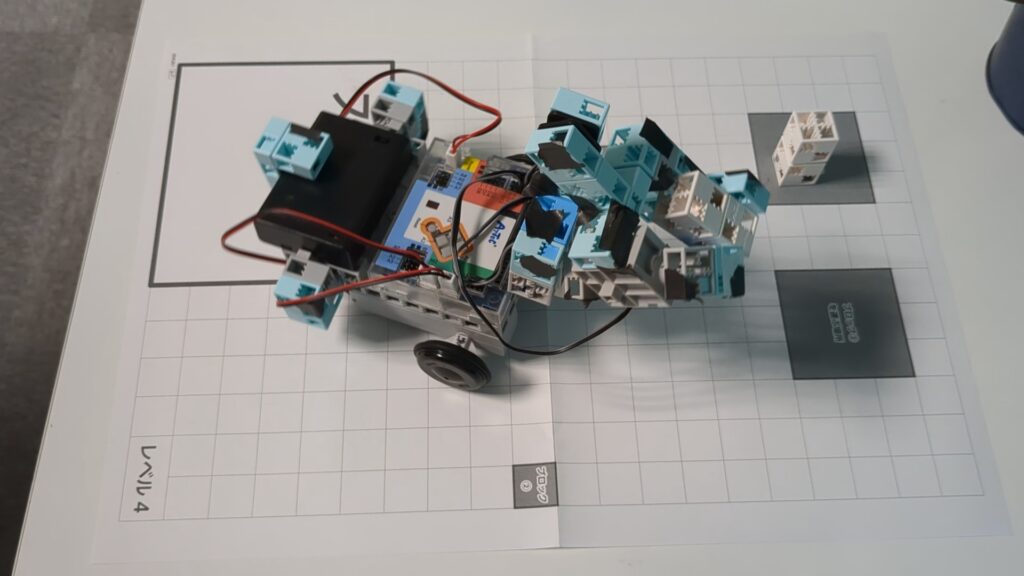
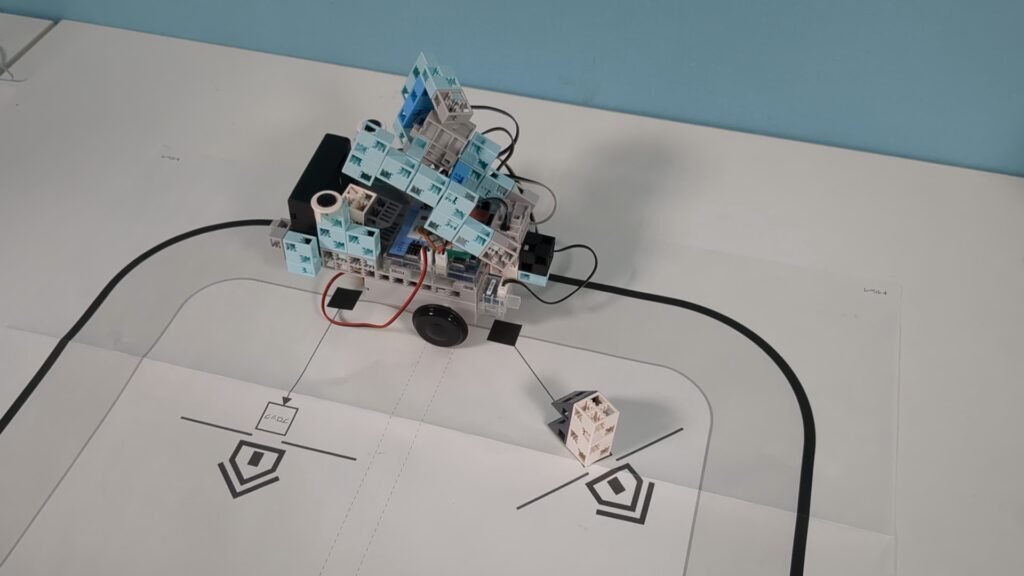
Harutoさんの作品です。 プログラミングで2つのブロックを搬送できるロボットを作りました! 正確に指定された位置に運搬できていますね!
営業時間 月~土 10:00~19:00
Harutoさんの作品です。 プログラミングで2つのブロックを搬送できるロボットを作りました! 正確に指定された位置に運搬できていますね!
Sosukeさんの作品です。 サーボモーターを加速度センサーで操作して、DCモーターでゴム銃の引き金を回しています。 男のロマンが詰まっていますね!

Sosukeさんの作品です。 加速度センサーをつかって操作するロボット。 アームにのせたブロックを飛ばして、タワーを倒した数が得点になります。
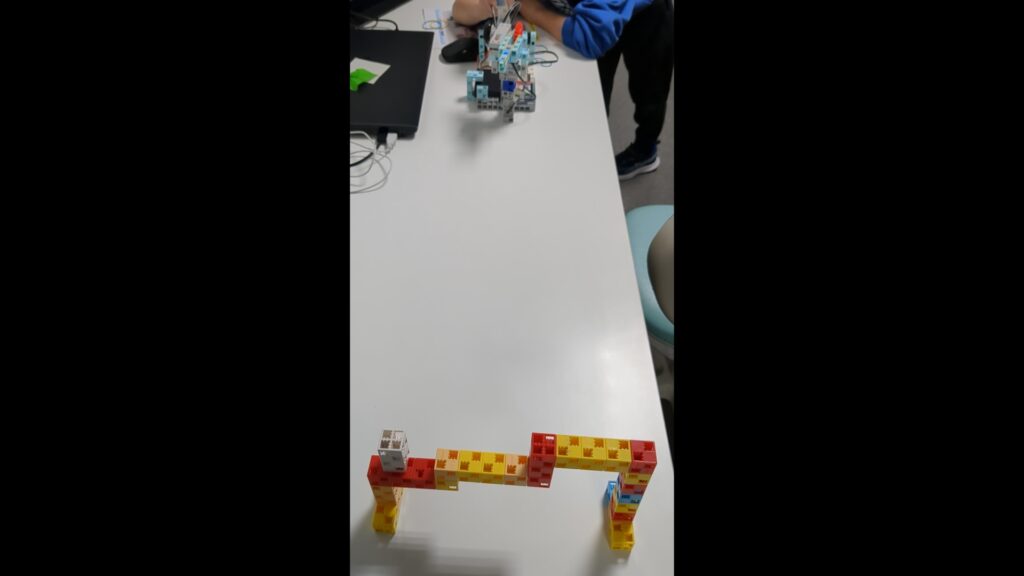
Koseiさんの作品です。 アームロボットをつくりました。 3つのブロックをそれぞれ決められた場所に運びます。 なんどもトライしてやっとできました。 よく頑張りました!
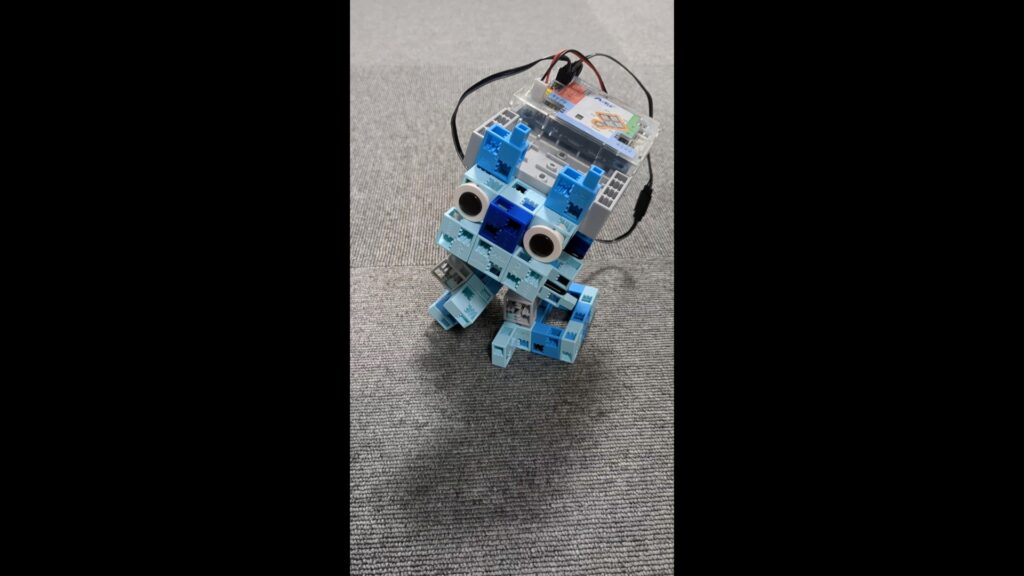
Riruさんの作品です。 二足歩行ロボットをつくりました。 プログラミングは自分でかんがえて、うまく歩けるように調整しました。よくできました!
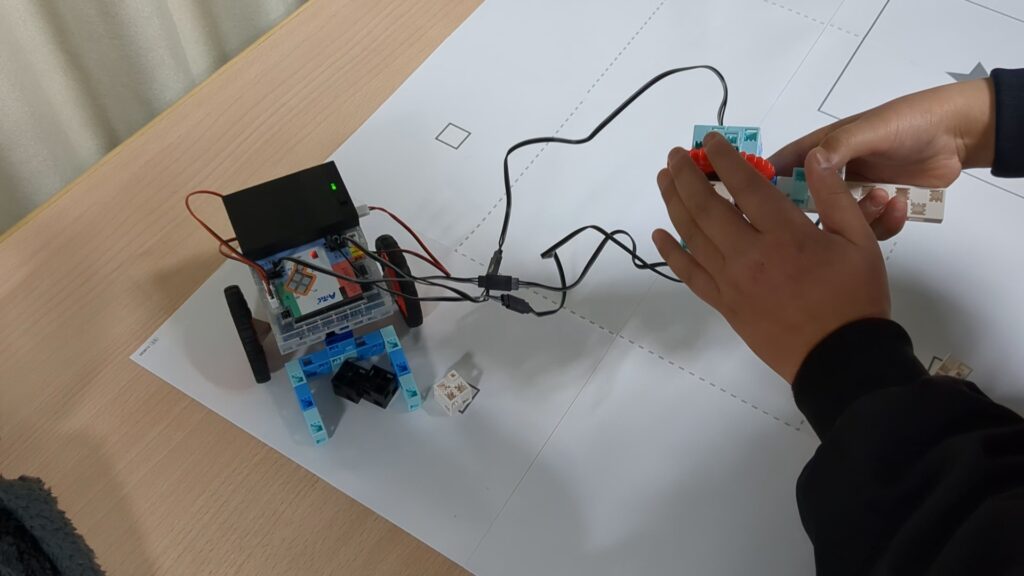
Humitoさんの作品です。 ロータリーエンコーダをつかって操作するロボットをつくりました。 ホイールを回転させると、その早さに合わせて移動します。 普段は右に曲がるけれど、タッチセンサーを押すと左に曲がります。
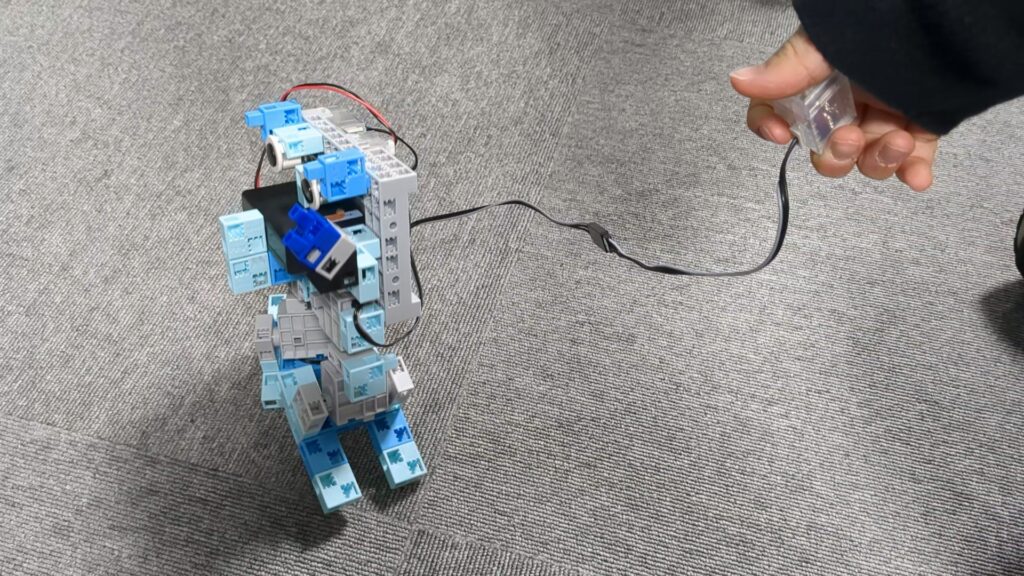
Riruさんの作品です。 二足歩行ロボット。タッチセンサーを操作すると、後ろ向きにも歩けるようにしました! 足の向きを上手に調整出来ていて、綺麗に歩けていますね!
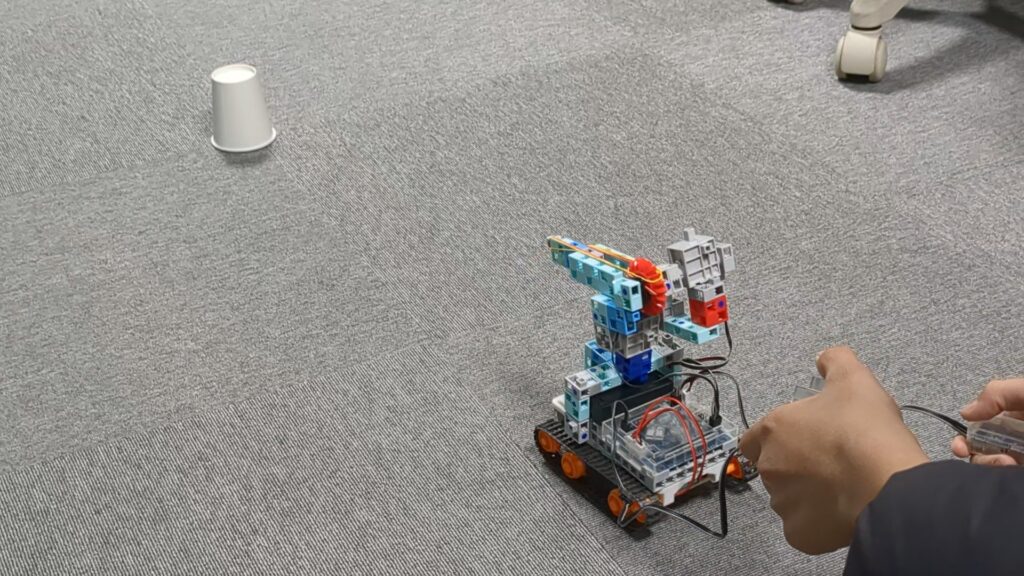
Soutaさんの作品です。 最後の課題、オリジナルロボットをつくりました。 キャタピラを組み立てて、ブロックと融合。 加速度センサーとタッチセンサーの組み合わせで、ゴムでっぽうを発射できるようにしました!
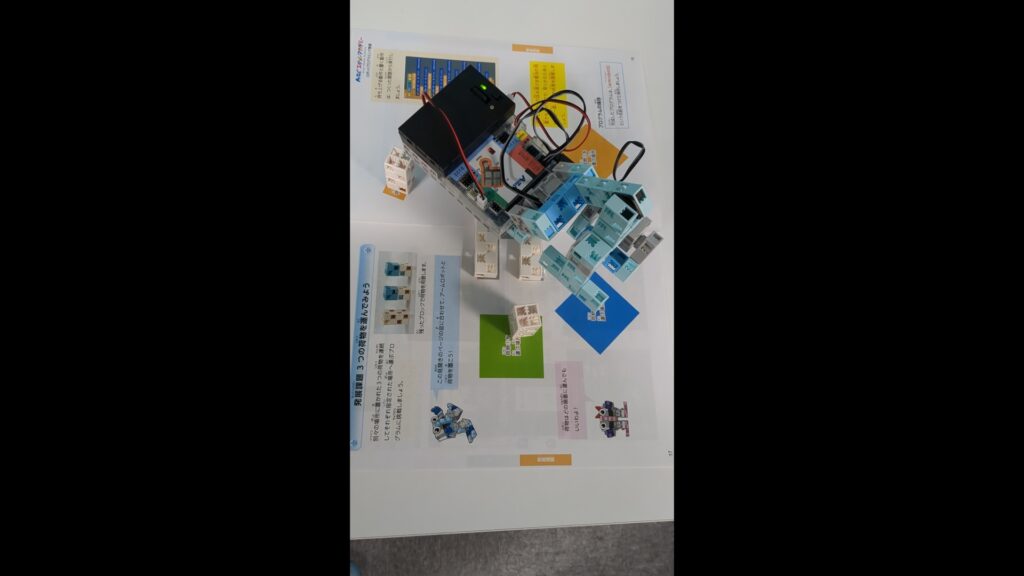
Senaさんの作品です。 ゴミ収集ロボットをつくりました。家庭から集めたゴミを収集所にはこびます。
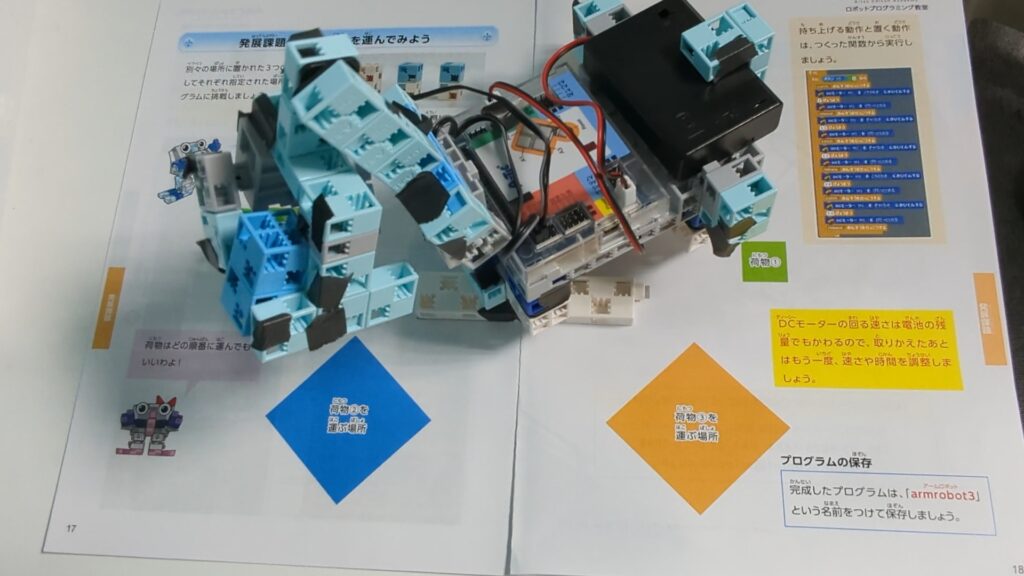
Masatoさんの作品です。 アームロボットをつくりました。DCモーターの回転方向とスピード、そして回転時間を細かく調整して、3つのブロックを順番に目的の場所まで運ぶロボットに仕上げました。よくできました!