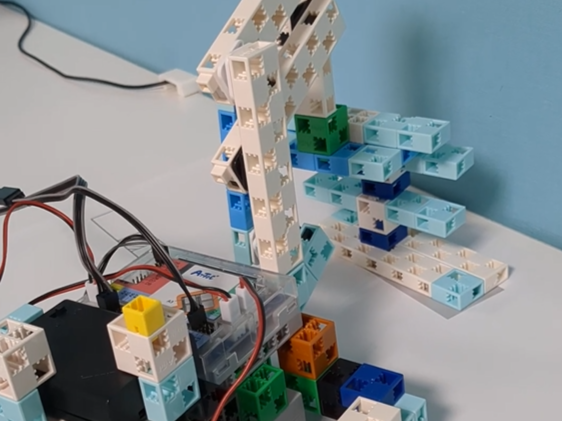
Ko.Nさんの作品です。 フォークリフトロボットを作りました。 加速度センサーとタッチセンサーを組み合わせて操作できるようにしました。 3つの部品を積み上げることにチャレンジ!! 実際のフォークリフトみたいに、大きくてパ …
営業時間 月~土 10:00~19:00
Ko.Nさんの作品です。 フォークリフトロボットを作りました。 加速度センサーとタッチセンサーを組み合わせて操作できるようにしました。 3つの部品を積み上げることにチャレンジ!! 実際のフォークリフトみたいに、大きくてパ …
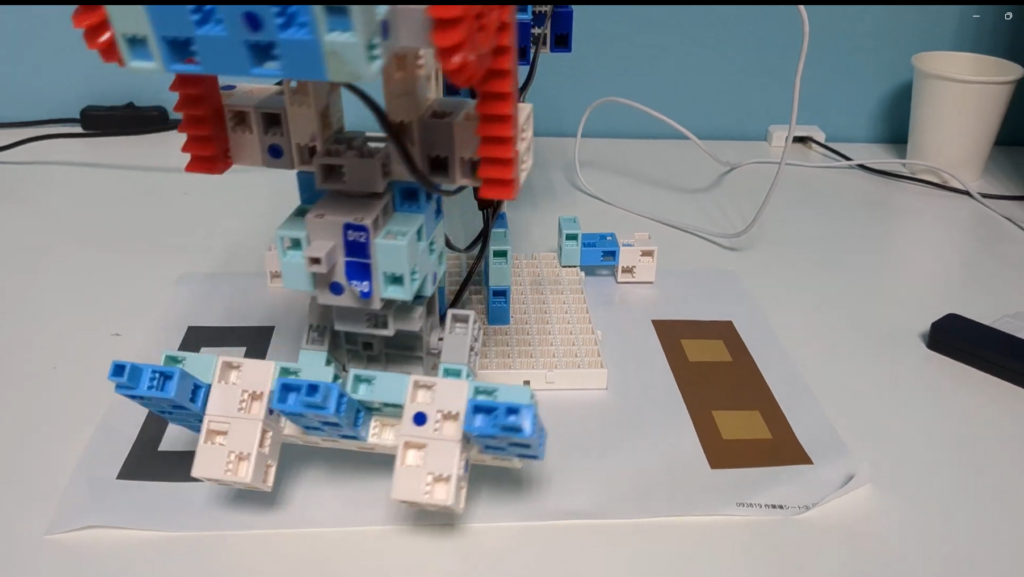
So.Tさんの作品です。 スカラアームロボットを作りました。 水平方向と上下方向の軸に動くロボットアームの動き。 また、2つのパーツを同時に運ぶアタッチメントとその動作を考えて作成しました。 工場のアームと変わらない性能 …
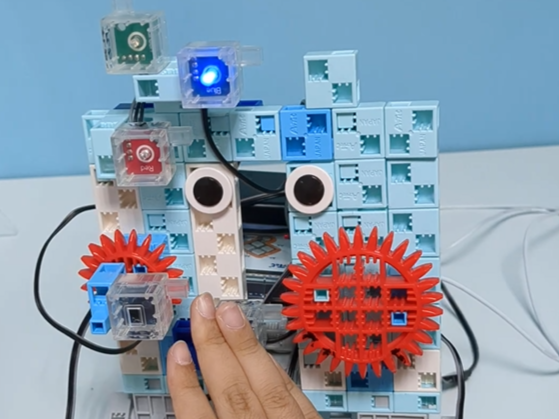
Re.Tさんの作品です。 4足歩行ロボットを作りました。 加速度センサーで歩く速さをかえたり、音センサーで一時停止したりするなど、 センサーを総動員していろいろな動きを操作できるロボットに仕上がっています! まるでワンち …
So.Mさんの作品です。 オリジナルの二足歩行ロボットを作りました。 なんと、自宅で工夫して完成させたオリジナルです。 サーボモーターをうまく制御してとても自然に歩いています!! 高い技術力に脱帽です🚶🏻
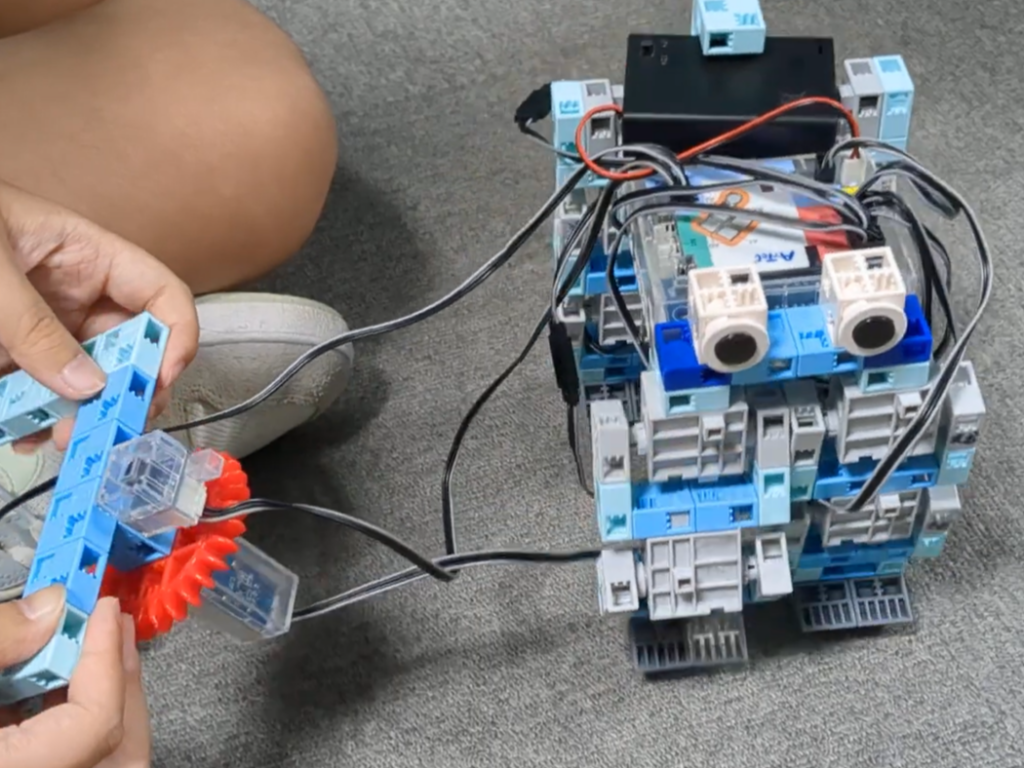
Re.Tさんの作品です。 4足歩行ロボットを作りました。 加速度センサーでロボットの速さが変わり、タッチセンサーでお座りします。 手をかざすと赤外線フォトリフレクターで検知し、動きが止まります。 とてもかわいい動きで、ペ …
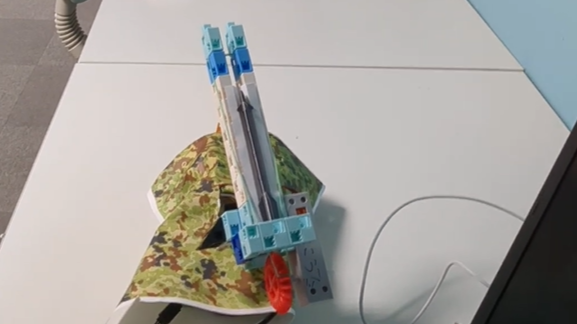
Ko.Nさんの作品です。 ミサイル発射装置を作りました。 加速度センサーでサーボモーターを操作して狙いを定めて、 発射装置をタッチセンサーで動かしてミサイルを発射します。 まるで本物のような動きで、とてもかっこいいです! …
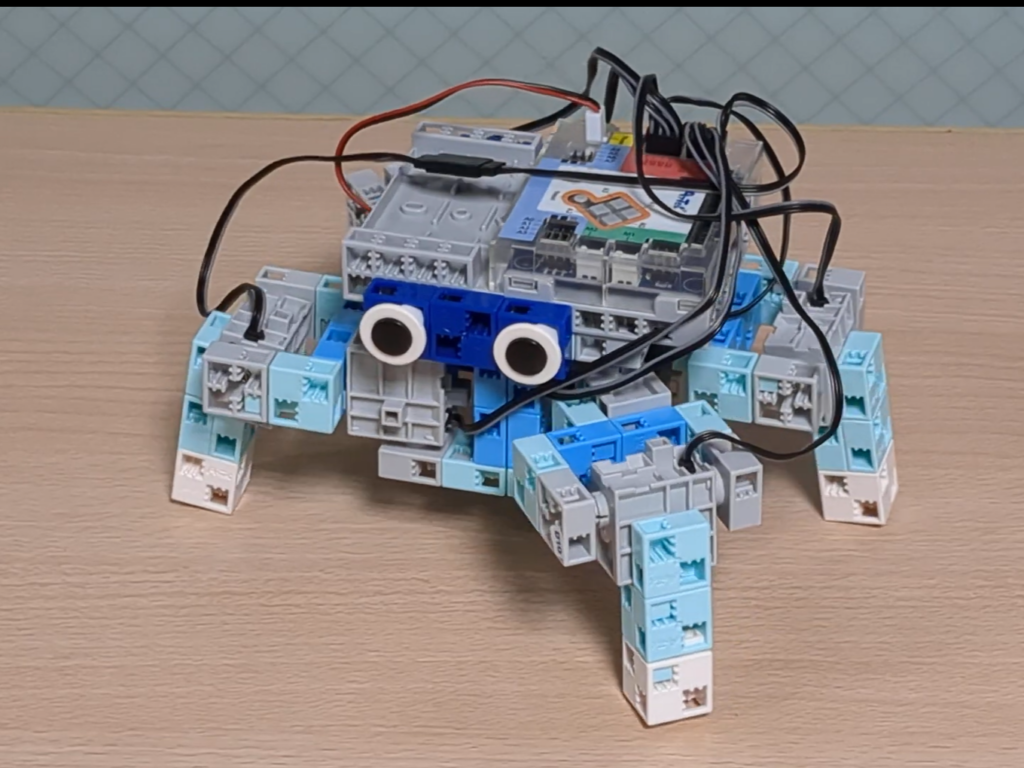
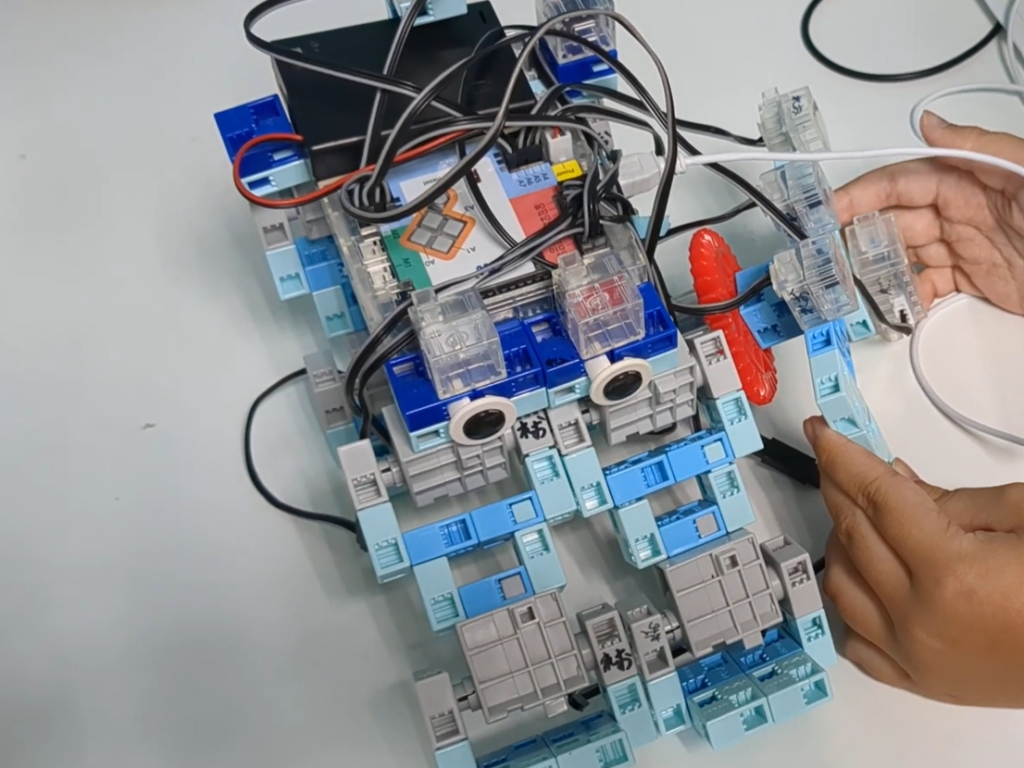
Ga.Kさんの作品です。 クモのようなロボットを作りました。 サーボモーター8つをつかって、4本の足を交互に動かし移動していきます。 まるで本物のクモみたいに、うまくそれぞれの足を使って360度どこにでも行けます! 不思 …
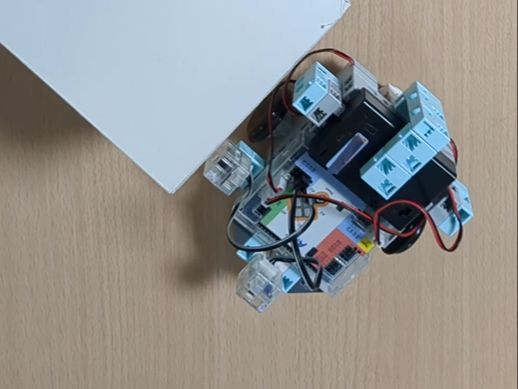
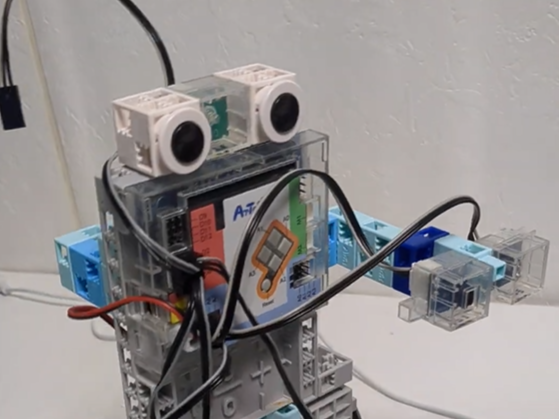
Ri.Sさんの作品です。 ウォールトレースロボットを作りました。 2つの赤外線フォトリフレクタをつかって、右横と前の壁を検出しています。 壁の周りを上手に移動するロボットです! まるで人のように、うまく壁の周りを進みます …
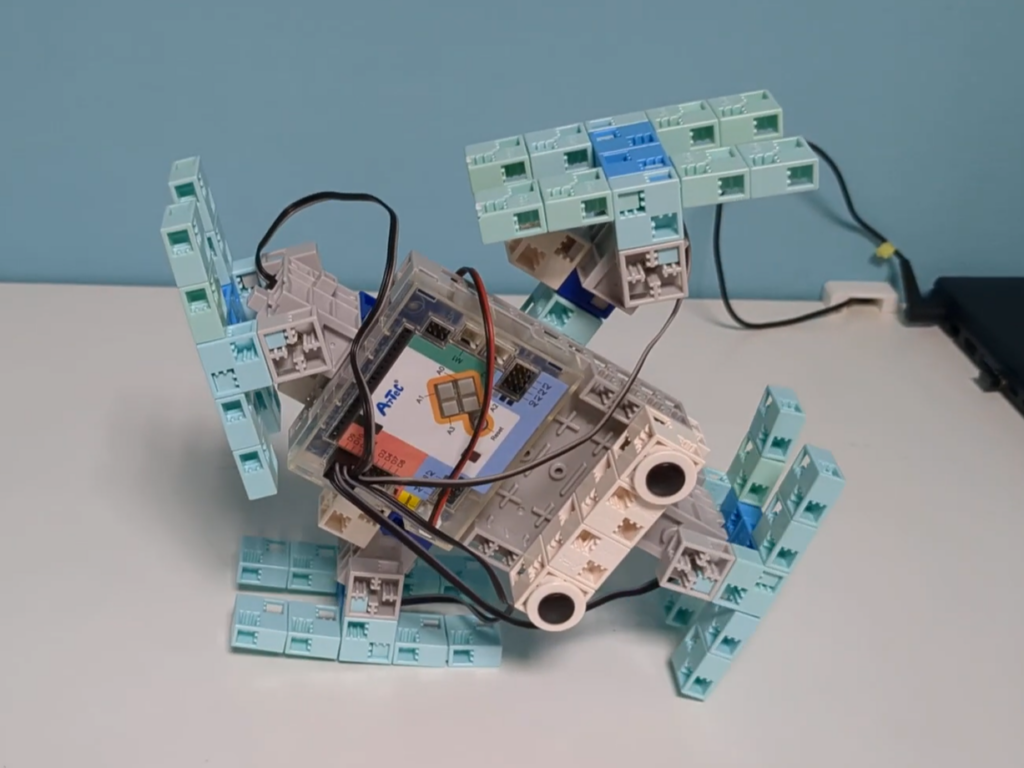
Re.Tさんの作品です。 サーボモーター6つ使って、4足歩行ロボットを作りました。 LEDを光らせたり、タッチセンサーをつかうことで動いたり止まったりできるようにしました。 さらには、赤外線フォトリクレクターをつかって障 …
Ga.Kさんの作品です。 大車輪ロボットを作りました。 4つのサーボモーターで動くように、何度も調整を繰り返してプログラミングしました。 まるで側転してるかのように、それぞれのモーターがうまくかみ合って移動します! ぐる …