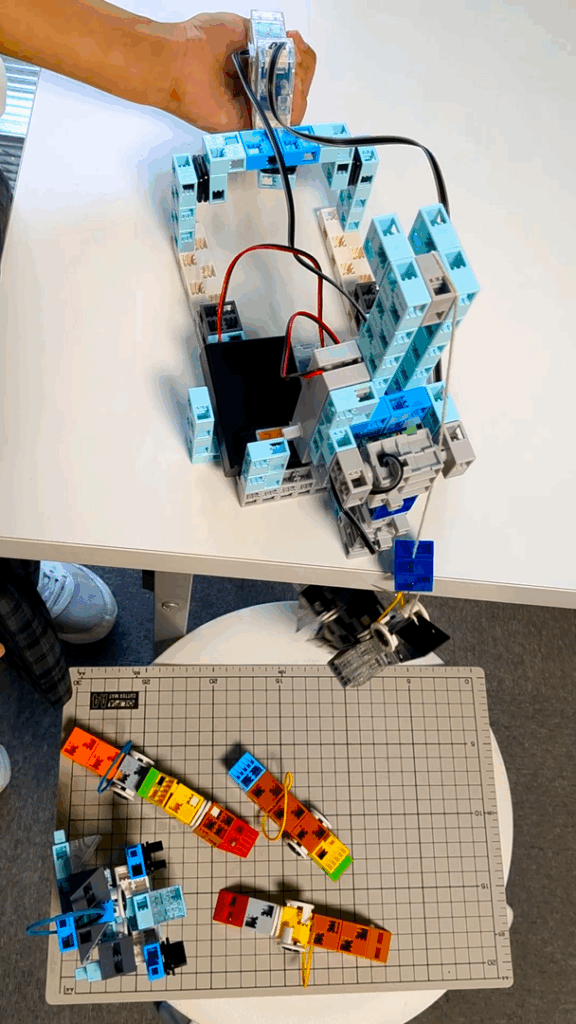
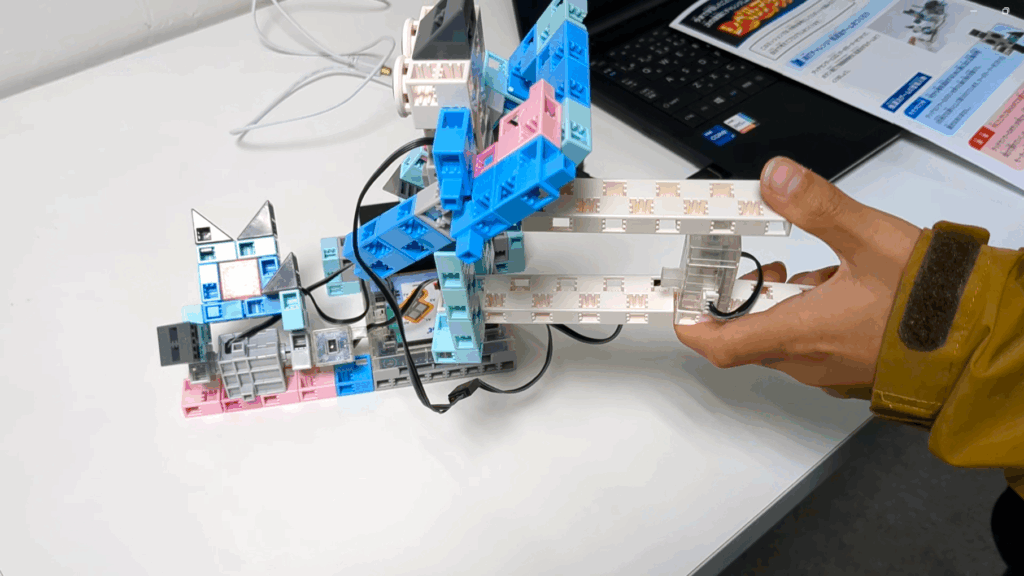
Riruさんの作品です。 加速度センサーをつかって、ジョイスティックコントローラーと、サーボモーターでうごく発射台をつくりました。 その発射台で輪ゴムを飛ばして遊ぶ、的あてゲームをつくりました。 さらに改造して、魚つりゲ …
営業時間 月~土 10:00~19:00
Riruさんの作品です。 加速度センサーをつかって、ジョイスティックコントローラーと、サーボモーターでうごく発射台をつくりました。 その発射台で輪ゴムを飛ばして遊ぶ、的あてゲームをつくりました。 さらに改造して、魚つりゲ …
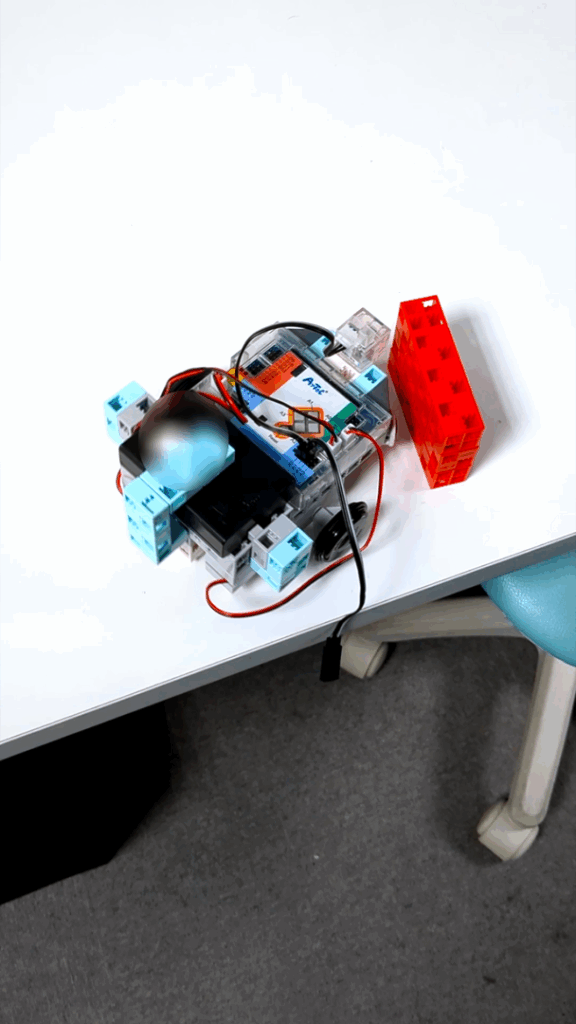
Senaさんの作品です。 赤外線フォトリフレクタというセンサーをつかって、進行方向にある壁を検知して曲がる車をつくりました。 すこしずつ調整しながら、3つの壁にぶつからずに進むようになりました!! 壁を避けて進むかしこい …
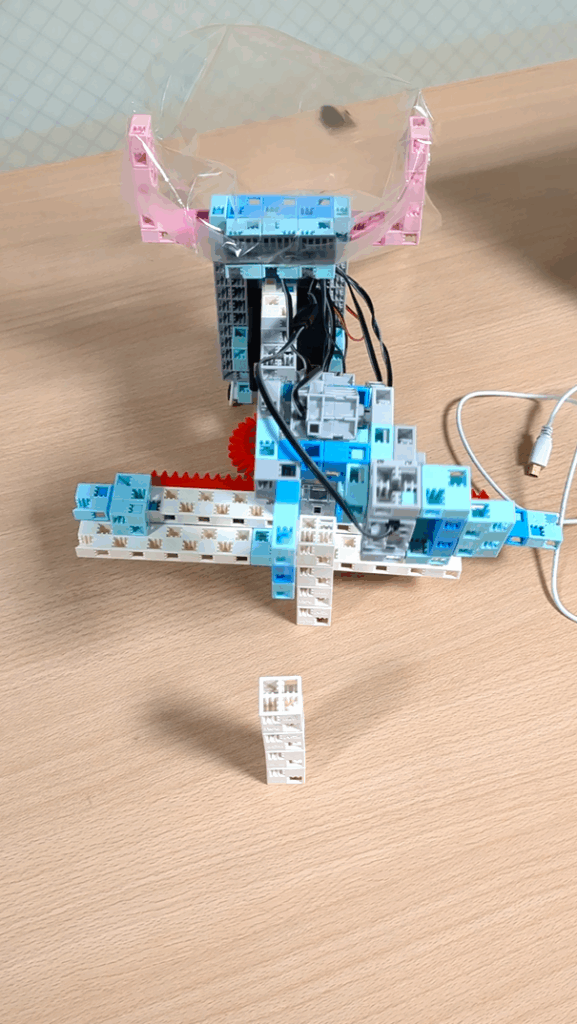
Gakuさんの作品です。 ブロックをセンサーで検出しながら前進するロボットを作りました。 ブロックを検出するとアームで後ろの袋に回収します!! すごく便利なブロック検知ロボットで、どんどん回収🤖
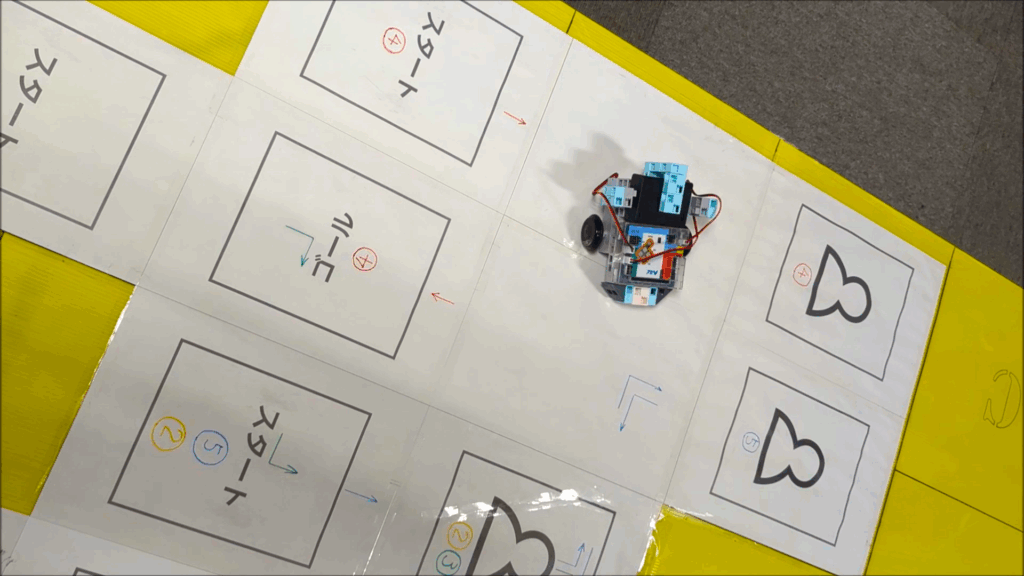
Sumireさんの作品です。 2つのDCモーターを操作して、目的地へすすむ自動車ロボットを作りました。 途中でお客さんをのせてゴールを目指す、タクシーを模した課題にチャレンジしました!! ゴールまでお客さんを連れていける …
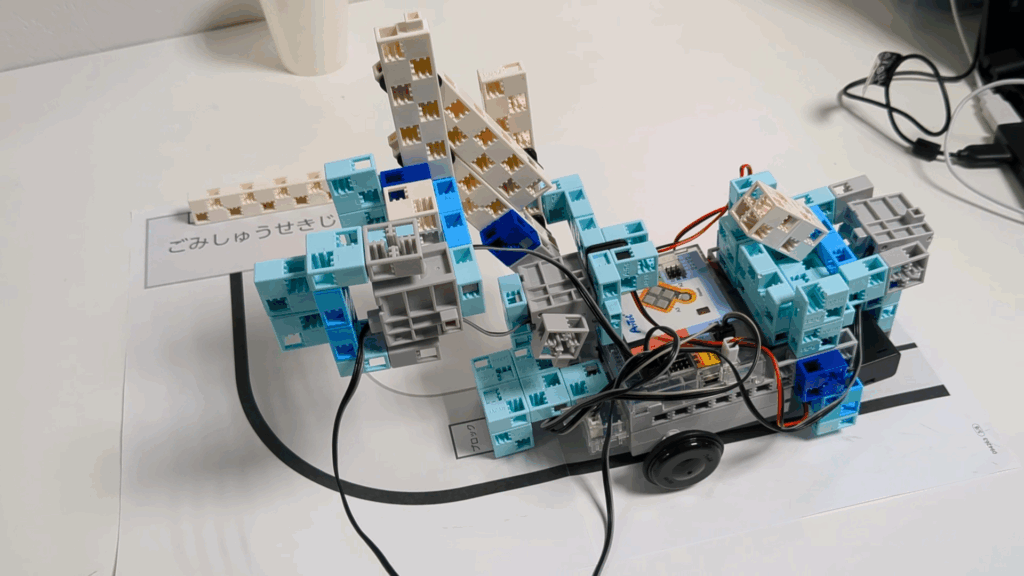
Sosukeさんの作品です。 ゴミにみたてたブロックを拾って荷台にのせてゴールに進むロボットです。 ロボットの形状とプログラムはオリジナルです!! ちゃんと荷台に運んで集積場までいく姿は、本物の収集車です🚛
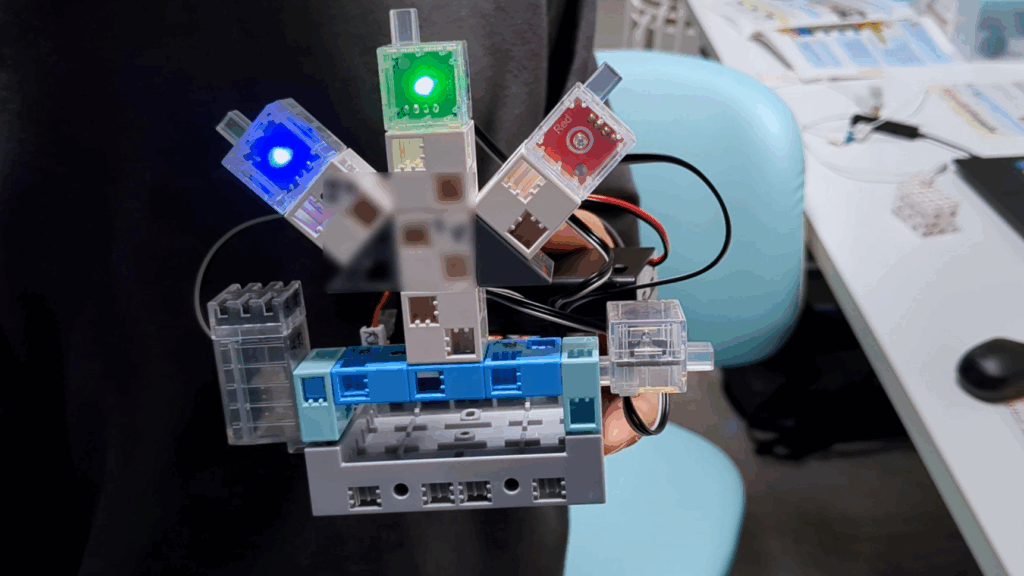
Harutoさんの作品です。 3つのLEDが音に反応して順番に光る、イルミネーションをつくりました。 声を出しても綺麗にピカピカ光ってくれます!!✨🔵🟢🔴✨
Gakuさんの作品です。 鬼退治ゲームを制作しました。 ボタンを連打することで鬼を倒す、という連打ゲームです。 鬼の動きやプレイヤーの動きを、より面白くなるようオリジナルで作りました!! まさに鬼をたたいてやっつけている …
Reoさんの作品です。 鬼退治ゲームを作りました。 ボタンを連打することで、桃侍が3匹の鬼を倒す、というゲームです。 一定時間内に40回連打すれば勝ち!! 果たして鬼を倒すことができるのか……!!👊👹
Toseiさんの作品です。 なぜかチェーンソーを作っちゃいました。 タッチセンサーをおすとノコギリが回転しだします…!!
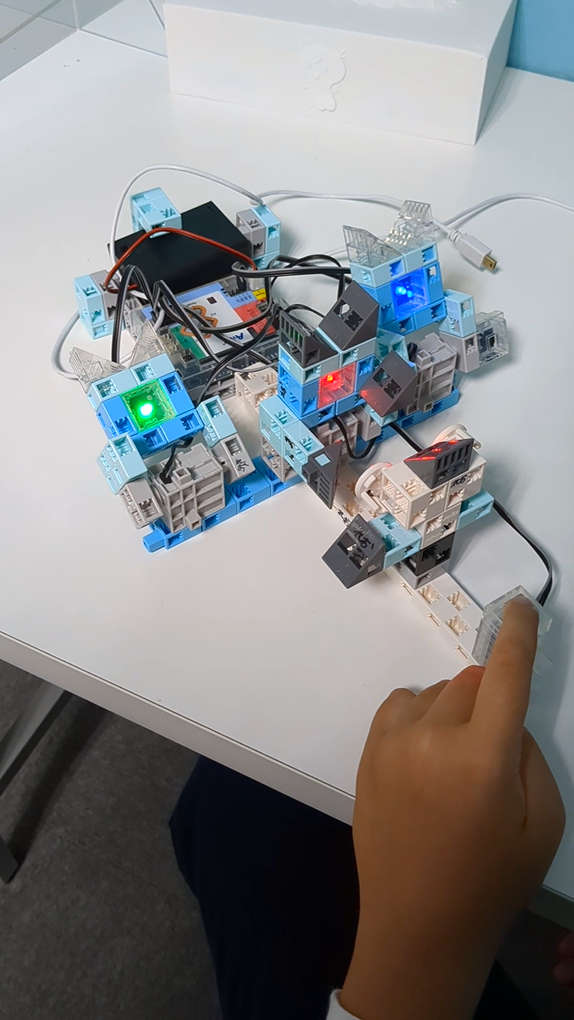
Gakuさんの作品です。 番犬ゲームロボットを作りました。 骨(餌)をとると、ランダムで目を覚ますゲームです。犬の動作や音にこだわって作りました!! 犬が目を覚まさないよう、慎重に……🐕🦴