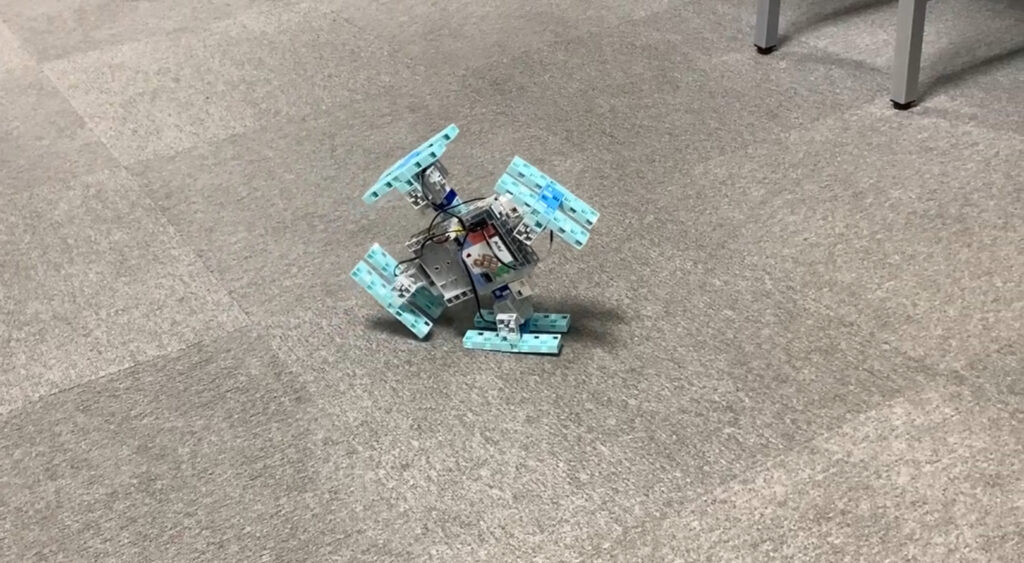
RMさんの作品です。 回転することで前に進む、回転歩行ロボットです。 4本の足は、それぞれサーボモーターがついています。床に面した足が傾くことで、次の足が床につくようになっています。 足が2本ついた時は、後ろ足は上に、前 …
営業時間 月~土 10:00~19:00
RMさんの作品です。 回転することで前に進む、回転歩行ロボットです。 4本の足は、それぞれサーボモーターがついています。床に面した足が傾くことで、次の足が床につくようになっています。 足が2本ついた時は、後ろ足は上に、前 …
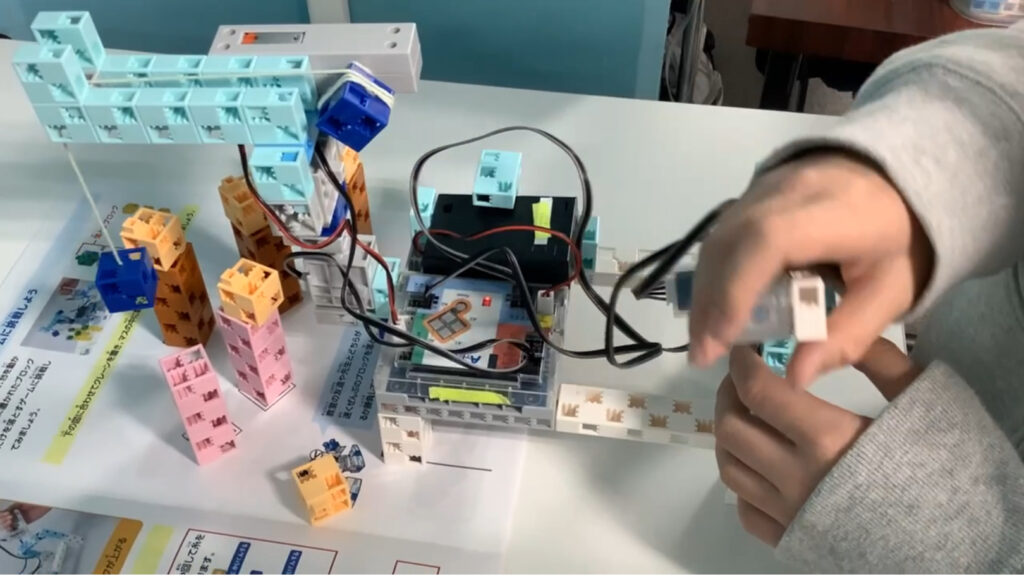
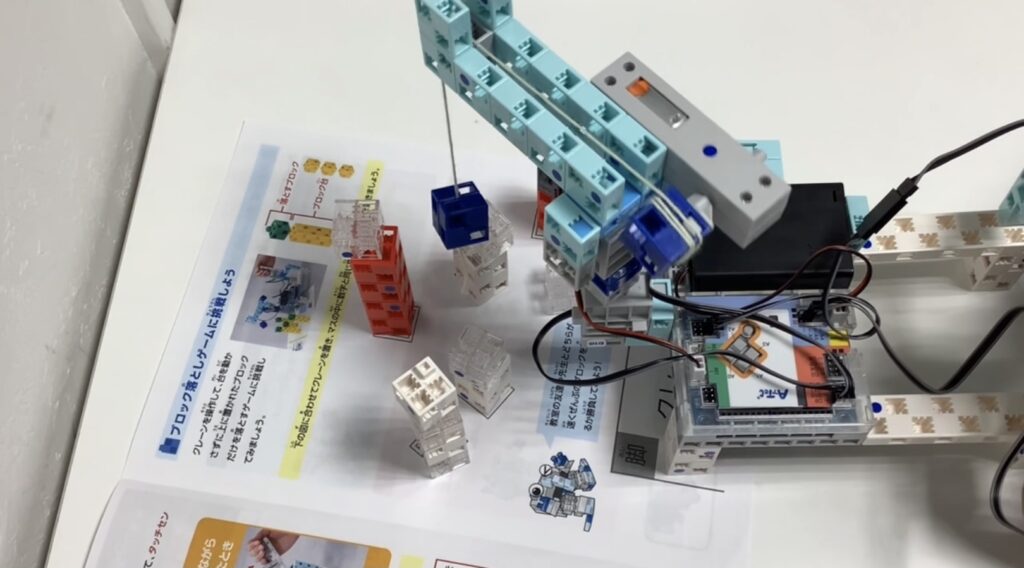
YoTさんの作品です。 クレーンを操作し、ブロックを落とすゲームロボットです。 ハンドルは左右と前後に動かすことができ、ハンドルの動きに合わせてクレーンが動きます。 タッチセンサーを押すことで、クレーンからぶら下がってい …
SoTさんの作品です。 荷物を下から持ち上げて運ぶ、フォークリフト型ロボットです。 コントローラに加速度センサーを使っていて、傾ける方向に進むことができます。タッチセンサーを押しながら前に傾けるとフォークリフトが下り、後 …
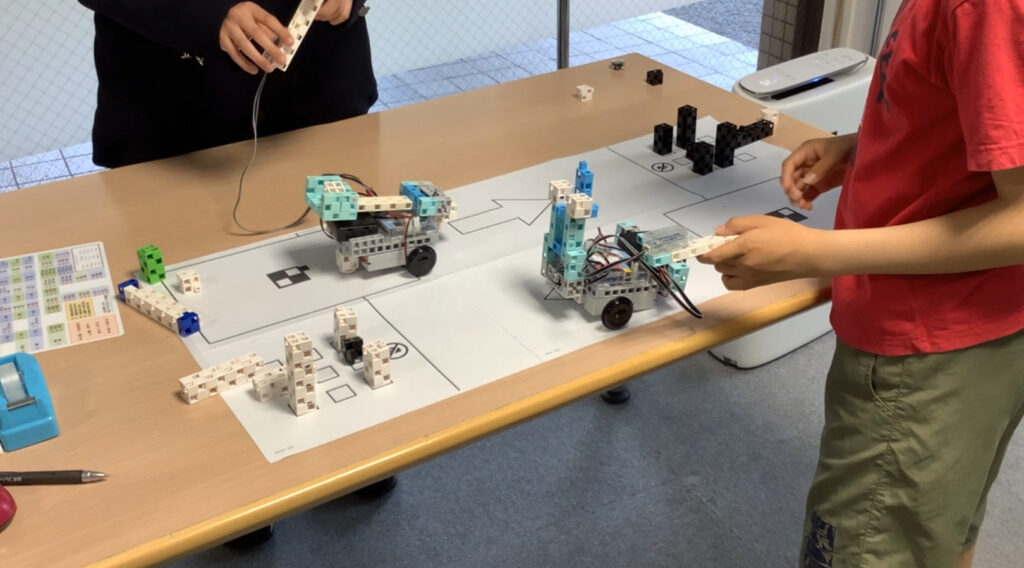
AKさんの作品です。 加速度センサーを使ったコントローラで操作する、自動車型ロボットです。 センサーが傾きを感知し、前に傾けると前進、後ろに傾けると後進、左右に傾けると曲がることができます。道中に障害物であるブロックがあ …
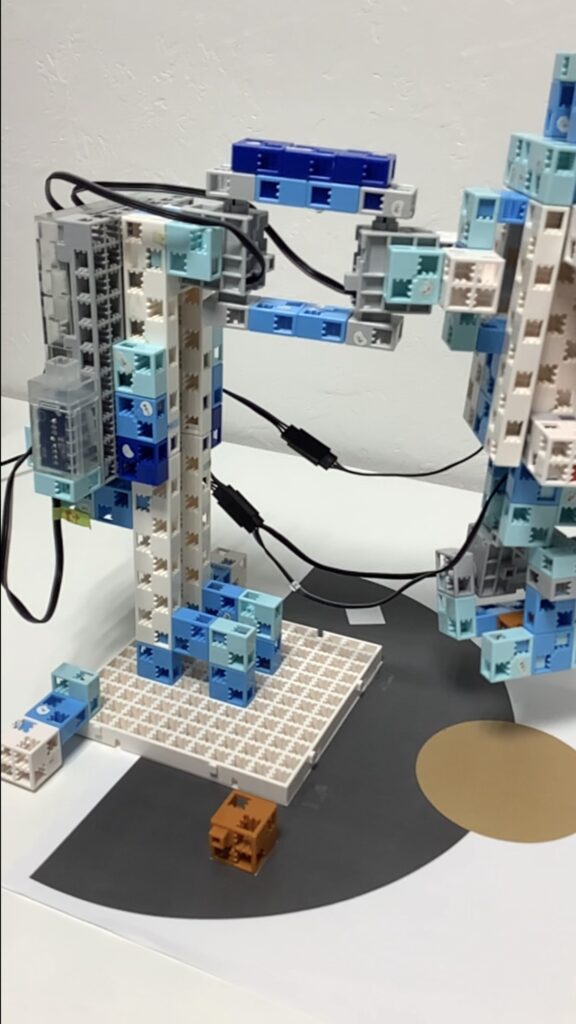
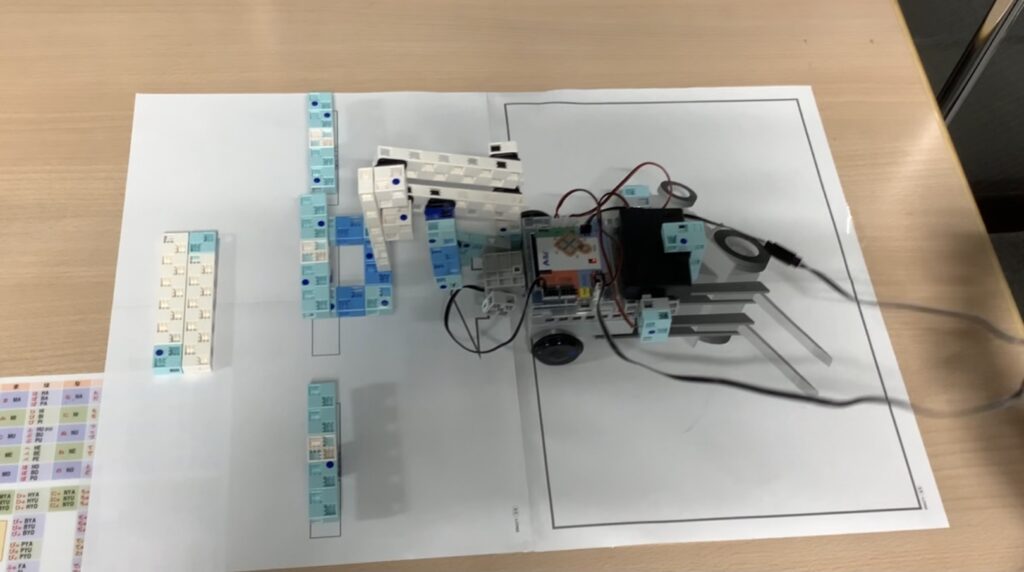
BHさんの作品です。 スカラロボットという、水平方向の動きが特徴的なアームロボットです。 アームは黒い半円の範囲内であれば、どこにでも動かすことができます。ボタンを押すとアームが動き、奥にあるブロックの上に、手前のブロッ …
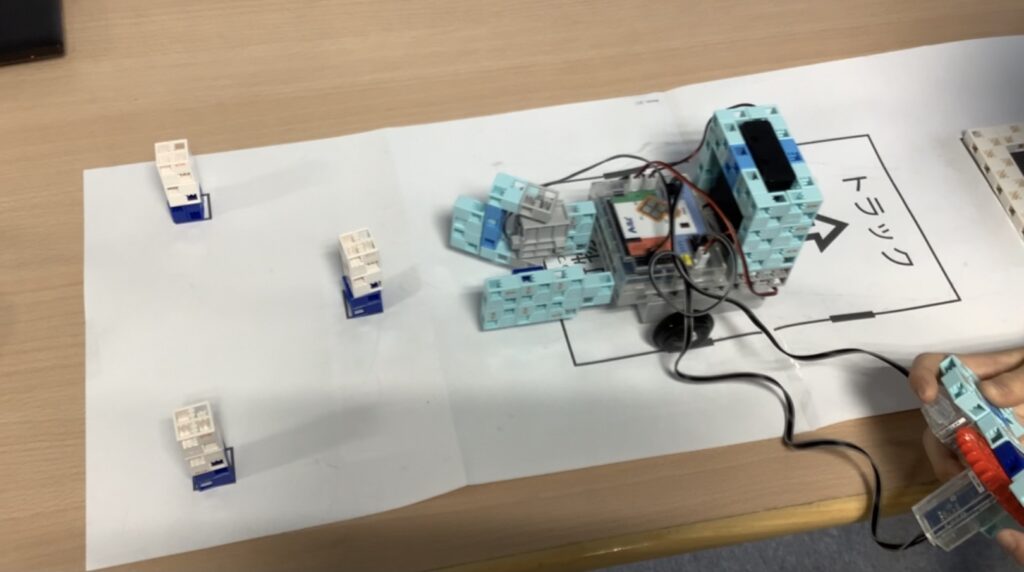
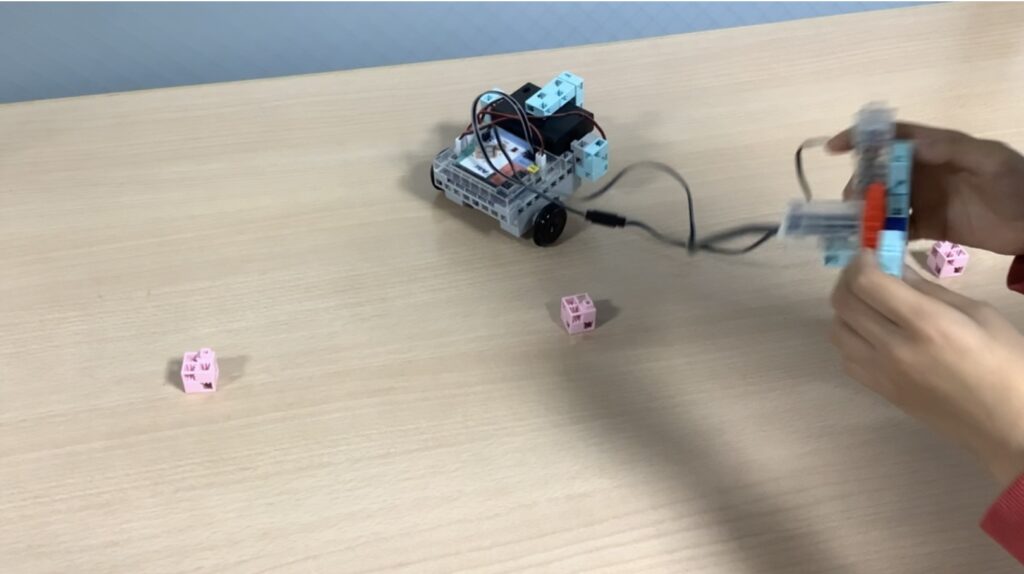
MKさんの作品です。 荷台の上に乗っている白い荷物を運び、移動する自動車型ロボットです。 コントローラには加速度センサーとタッチセンサーを使っています。加速度センサーがロボットの移動の役割を果たしていて、タッチセンサーを …
AKさんの作品です。 ブロックを投げて棒を倒すゲームです。 加速度センサーがコントローラになっていて、傾けて操作します。 コントローラを振ると、アームが動いてブロックを投げます。 制限時間以内に倒した棒の数が得点になりま …
RMさんの作品です。 タイミングゲームロボットです。 スタートすると水色のバーが回るので、タッチセンサーを押して止めます。 バーが、赤外線フォトリフレクタの前に来たときに止めると成功です。 成功するとバーの …
SoTさんの作品です。 糸で繋げたブロックを操って、台の上に乗った荷物だけを落とすゲームです。 コントローラには加速度センサーとタッチセンサーを使っていて、前後左右に動かすことで向きを決めることができます。またタッチセン …
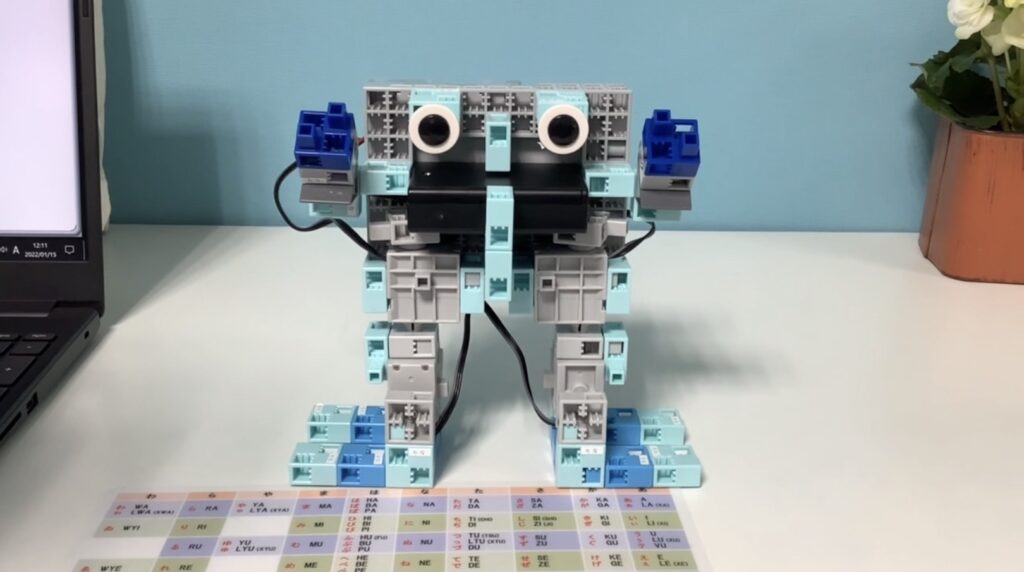
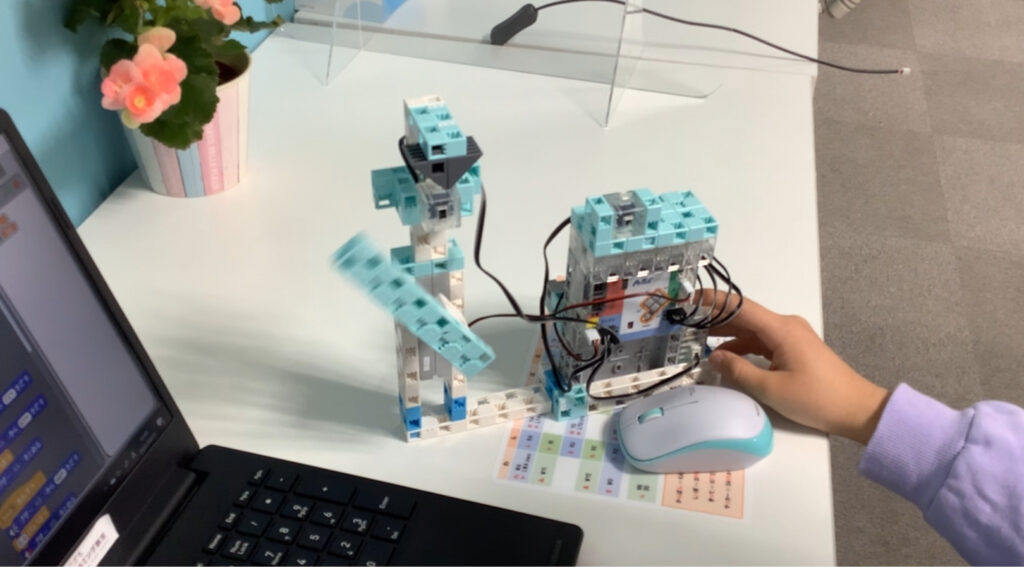
RMさんの作品です。 自動で動く2足歩行ロボットです。 サーボモータを1本の足に2つずつ、合計4つ使っています。それぞれの角度を少しずつ調整して、正しく前に歩く必要があります。 右足の動きと左足の動きをそれぞれプログラム …