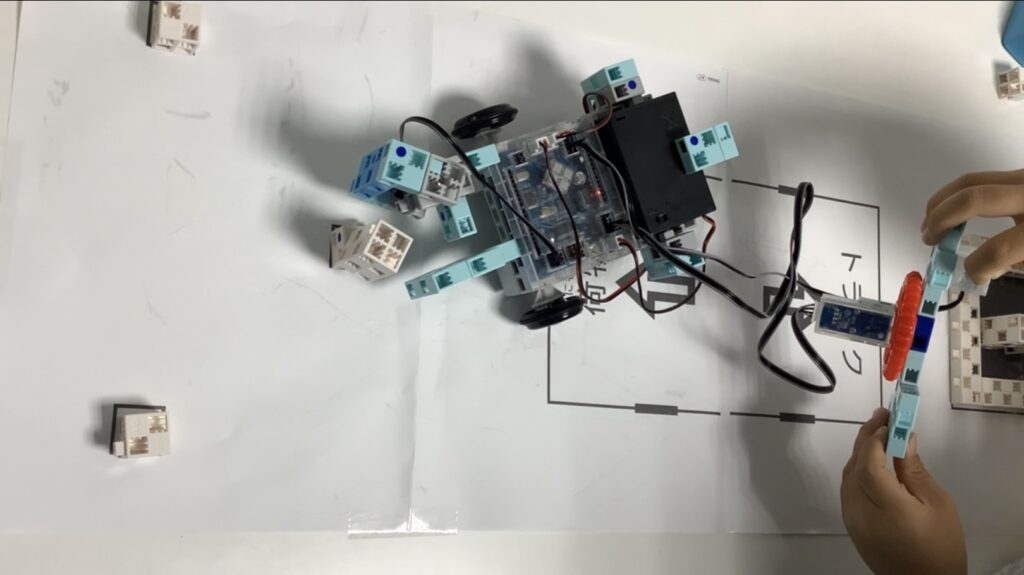
RMさんの作品です。 荷物を下から持ち上げて運ぶ、フォークリフト型のロボットです。 コントローラには加速度センサーとタッチセンサーをつけています。コントローラを動かすことでロボットが前後左右に動き、タッチセンサーを押すこ …
営業時間 月~土 10:00~19:00
RMさんの作品です。 荷物を下から持ち上げて運ぶ、フォークリフト型のロボットです。 コントローラには加速度センサーとタッチセンサーをつけています。コントローラを動かすことでロボットが前後左右に動き、タッチセンサーを押すこ …
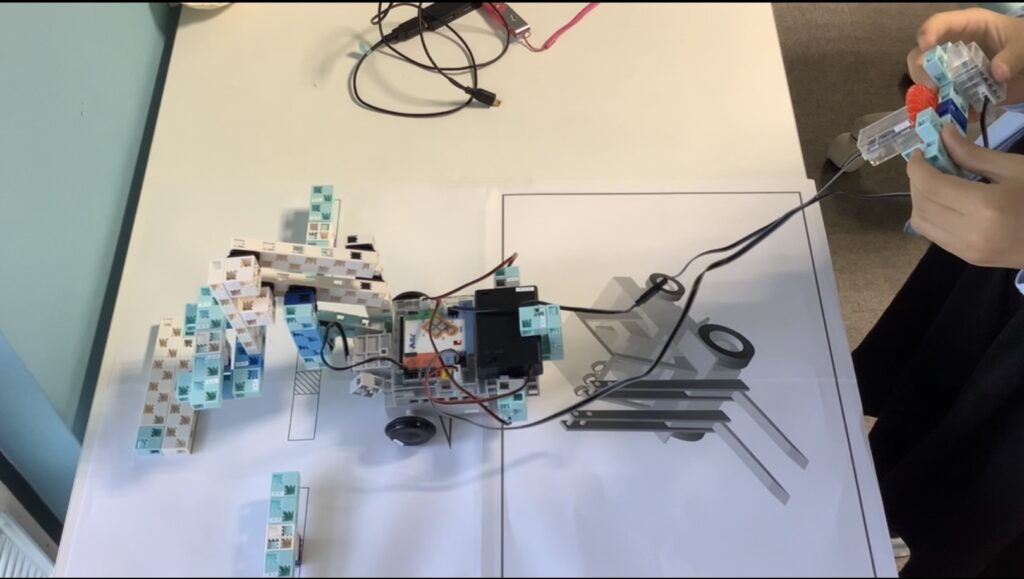
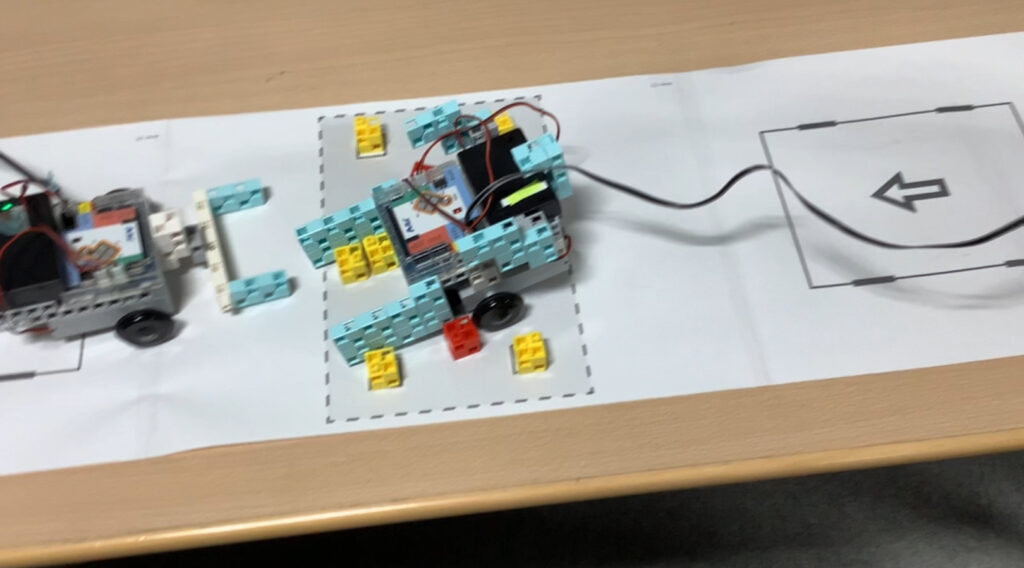
SoTさんの作品です。 荷台に上にある白い荷物を運んで移動させる車型ロボットです。 コントローラには加速度センサーとタッチセンサーがついています。加速度センサーがロボットの前後左右の移動、タッチセンサーが荷物を掴む役割を …
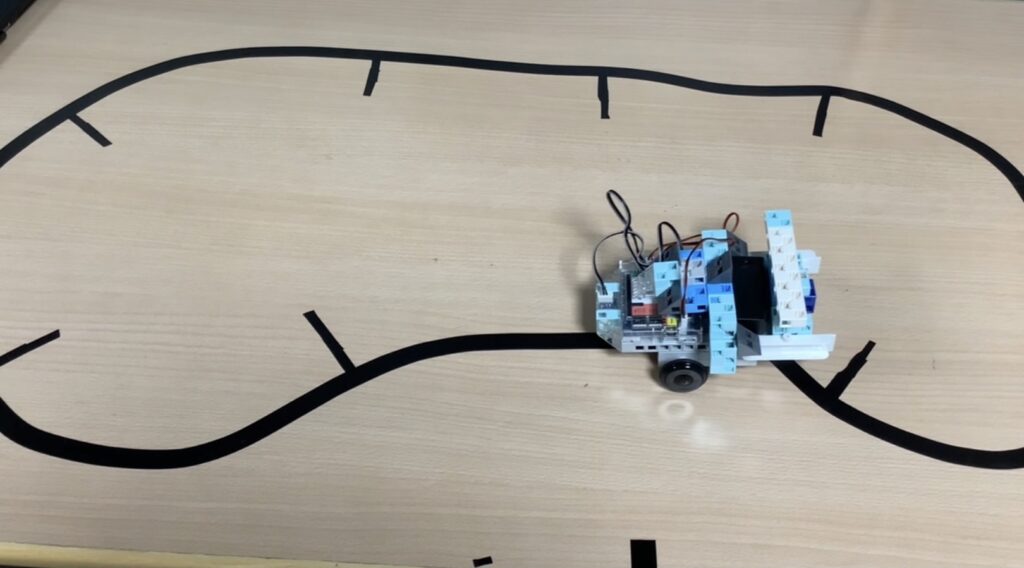
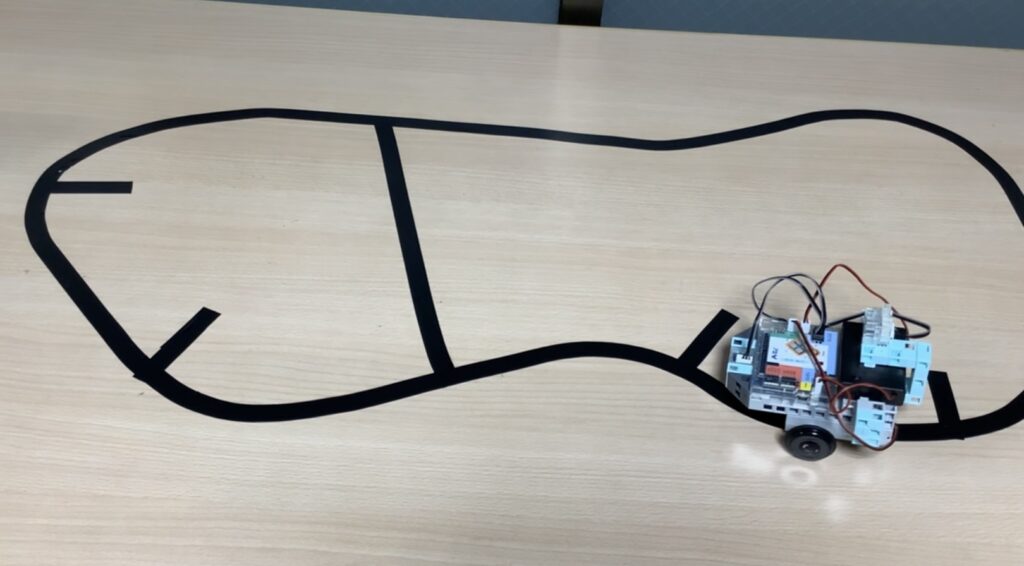
HaKさんの作品です。 黒い線の上を自動で進む車型ロボットです。 ロボットの下についている赤外線フォトリフレクタが、地面の色か黒色かを判断します。動画内では、黒い線で作ったオリジナルのコースの上で走らせています。 自動車 …
KaHさんの作品です。 手をかざすと、自動で消毒液を吹きかけてくれるロボットです。 赤外線フォトリフレクタで手をかざしたかどうかを感知します。その後モーターがボトルのプッシュ部分を押し、消毒液を吹きかけてくれます。 構造 …
YsTさんの作品です。 黒い線に沿って動く自動車型ロボットです。 ロボットの下に搭載されている赤外線フォトリフレクタで黒色かどうかを判別し、その色の線に沿って動きます。 更にもう一つの赤外線フォトリフレクタで、内側の黒い …
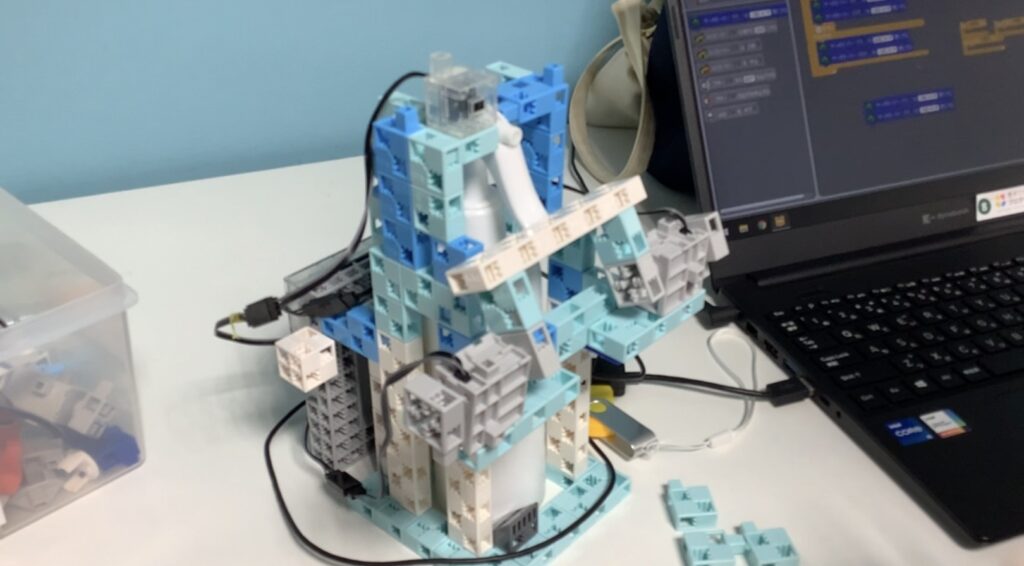
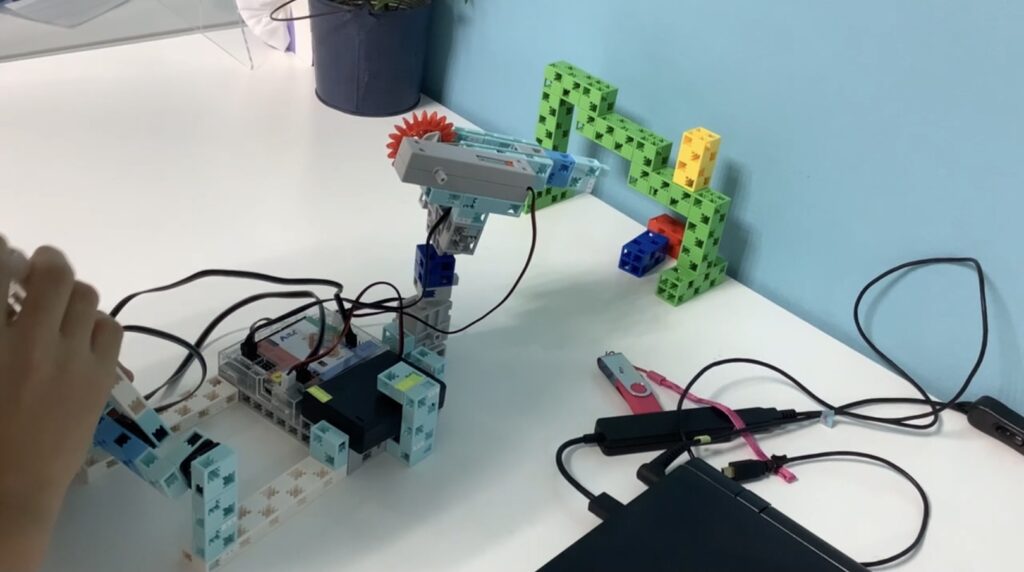
KaHさんの作品です。 ERC2021競技会のレベル6ステージを攻略したロボットです。 高台に乗ったお姫様(赤いブロック)を地面に落とさず運ぶミッションです。 サーボモータを高台と同じ高さにし、長いステーを回転させお姫様 …
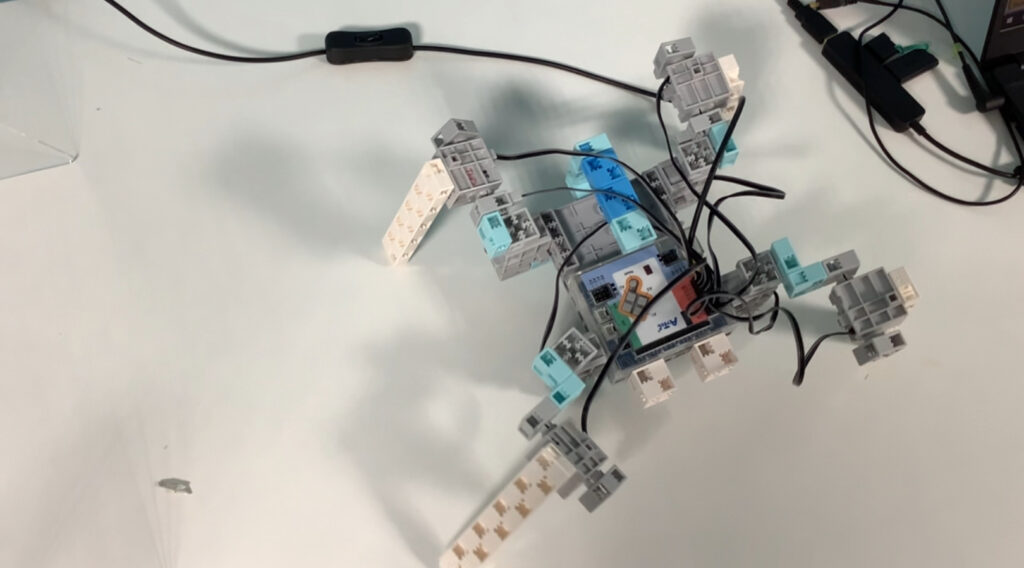
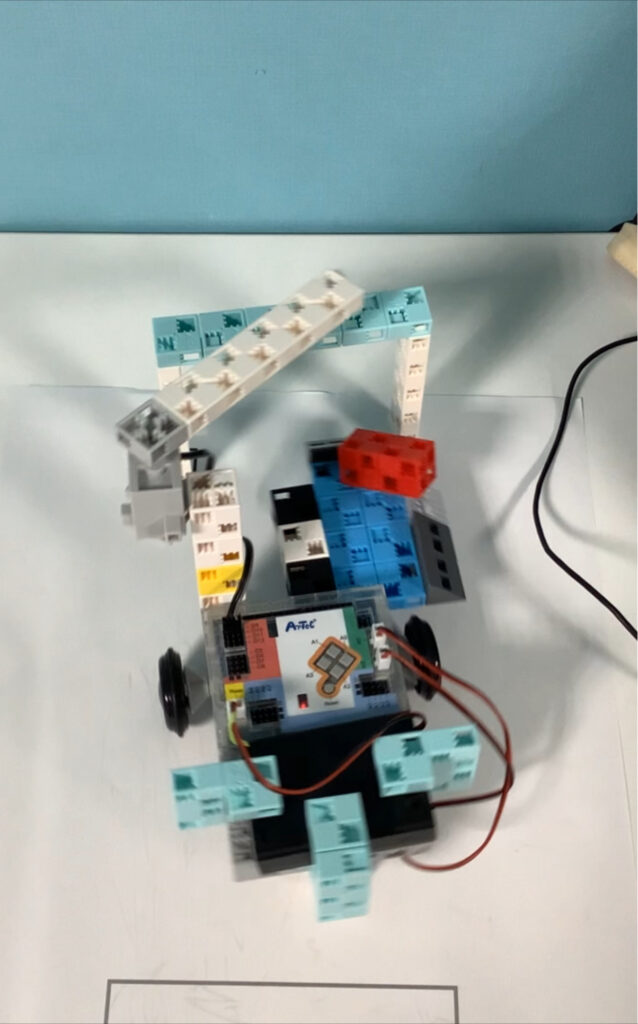
SoHさんの作品です。 オリジナルの四足歩行ロボットです。 関節部分に合計8つのサーボモータを使用して、大きく動けるようにしています。 サーボモータには細長いステーを取り付けて、足を表現しています。 前足で体を押し出すよ …
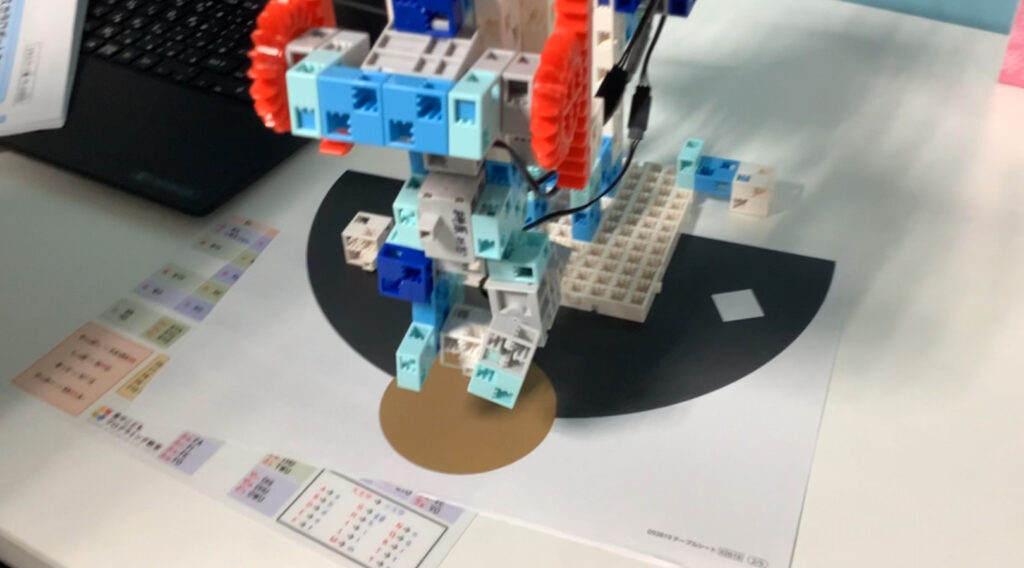
MSさんの作品です。 スカラロボットとは、垂直方向と水平方向の動作のうち水平方向に特化したロボットのことです。 アームは、黒い半円が示す範囲を回転することができます。 サーボモータと歯車を使い、アームを上下に動かすことも …
RMさんの作品です。 手元のコントローラで角度を決めて、紙飛行機を飛ばすロボットです。 コントローラには加速度センサーを使っていて、前後左右に動かすことで、飛ばす向きを決めることができます。 タッチセンサーを押すと歯車が …
YoTさんの作品です。 ロボットを操作してブロックを取り合う対戦ゲームです。 コントローラに加速度センサーが付いていて、センサーが傾きを検知して傾けた方向にロボットが進みます。 制限時間内に中央にあるブロックを自分の陣地 …