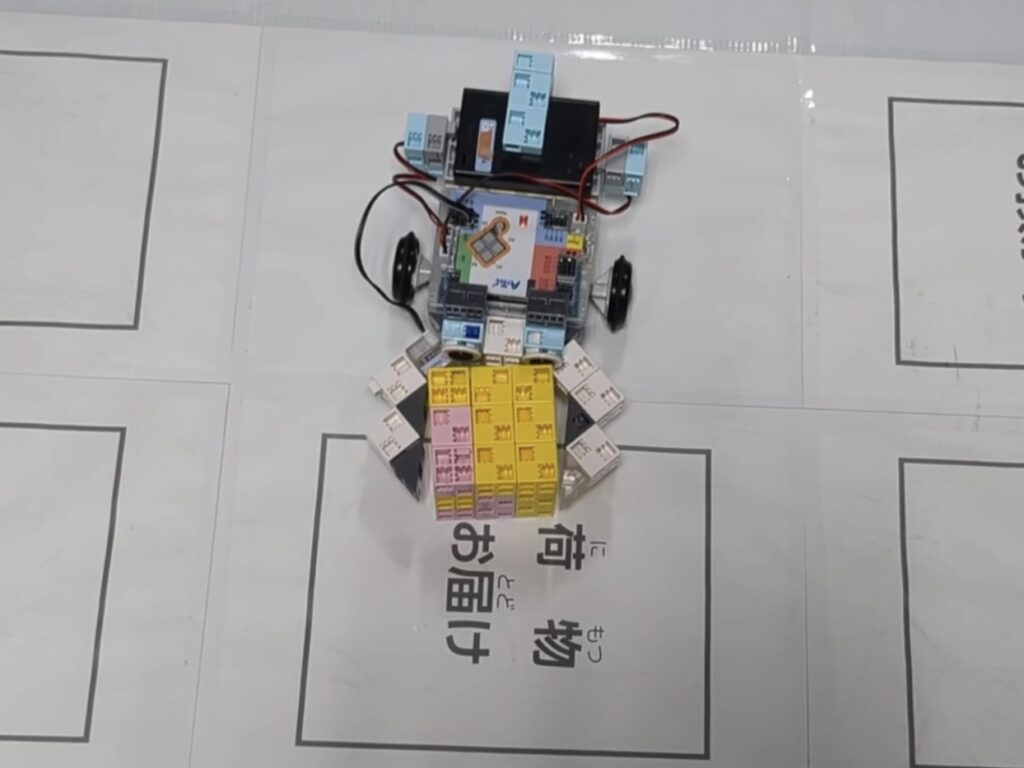
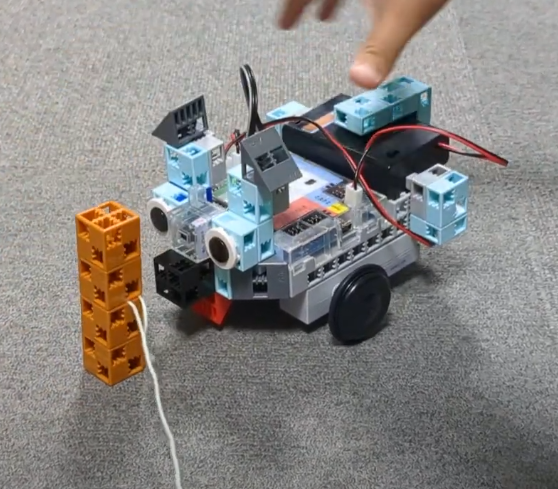
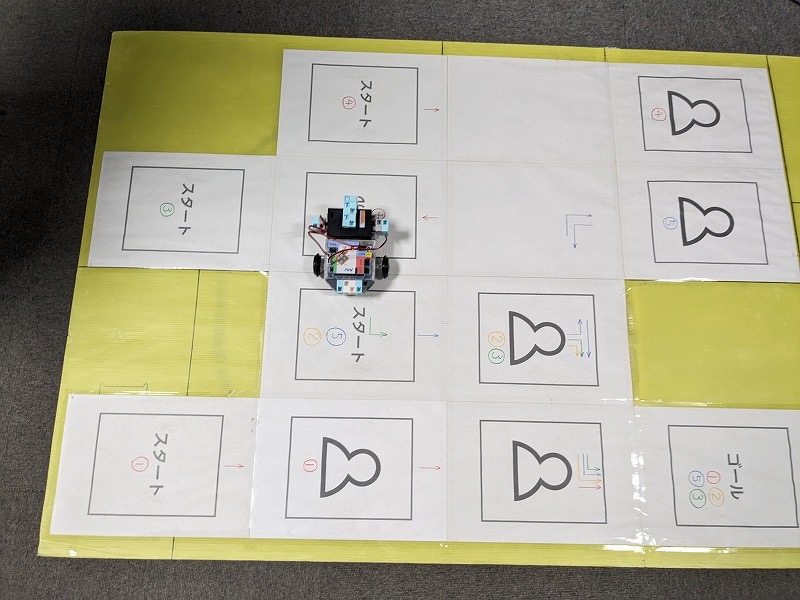
Ri.Sさんの作品です。 荷物をお届けできる運送ロボットを作りました。 DCモーターで車を制御して、赤外線フォトリフレクタで荷物があるかないかを検知します。荷物を受け取ってお届け場所まで持って行って、配達できたらゴールま …
営業時間 月~土 10:00~19:00
Ri.Sさんの作品です。 荷物をお届けできる運送ロボットを作りました。 DCモーターで車を制御して、赤外線フォトリフレクタで荷物があるかないかを検知します。荷物を受け取ってお届け場所まで持って行って、配達できたらゴールま …
F.Yさんの作品です。 犬に気づかれないように骨をとるゲームロボットを作りました。 犬の前にある骨をとると、10回のうち5回は気づかないですが、残りの5回は目を覚ましてしまいます。 また、残りの5回のうち2回は目を覚ます …
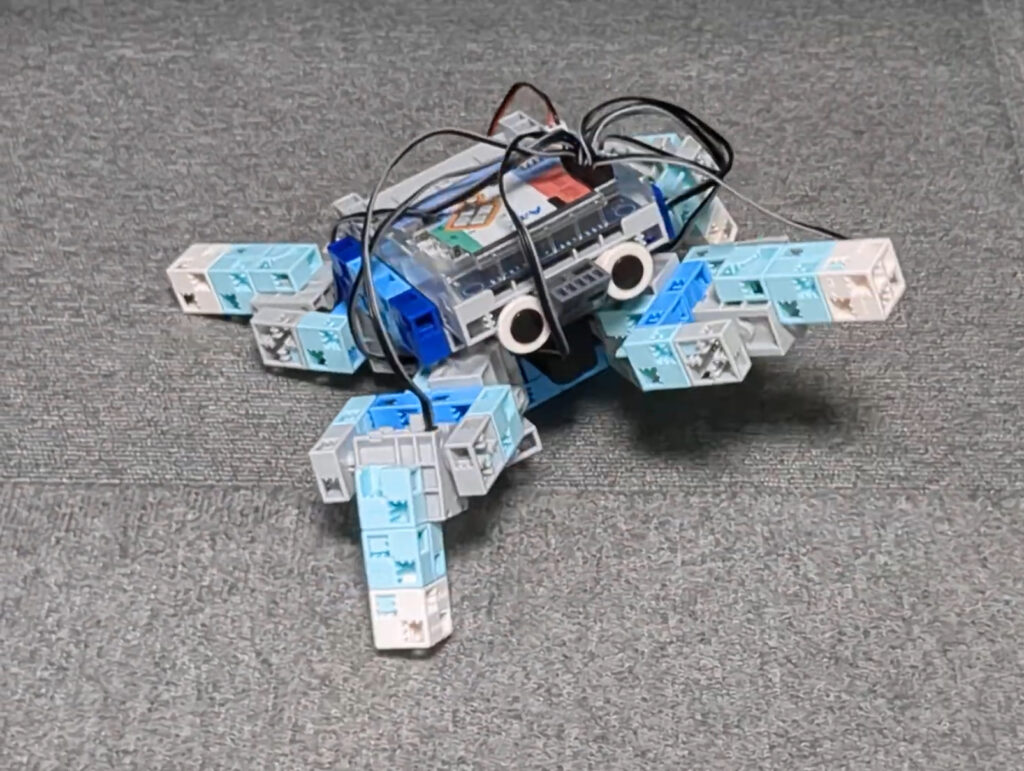
Ha.Kさんの作品です。 クモ(カニ?)のような4足歩行ロボットを作りました。 8つのサーボモーターを制御することで、4本の足を巧みにあやつり、後ろに動いていきます。 複雑な足ですが、しっかりと安定した動きでたくましいで …
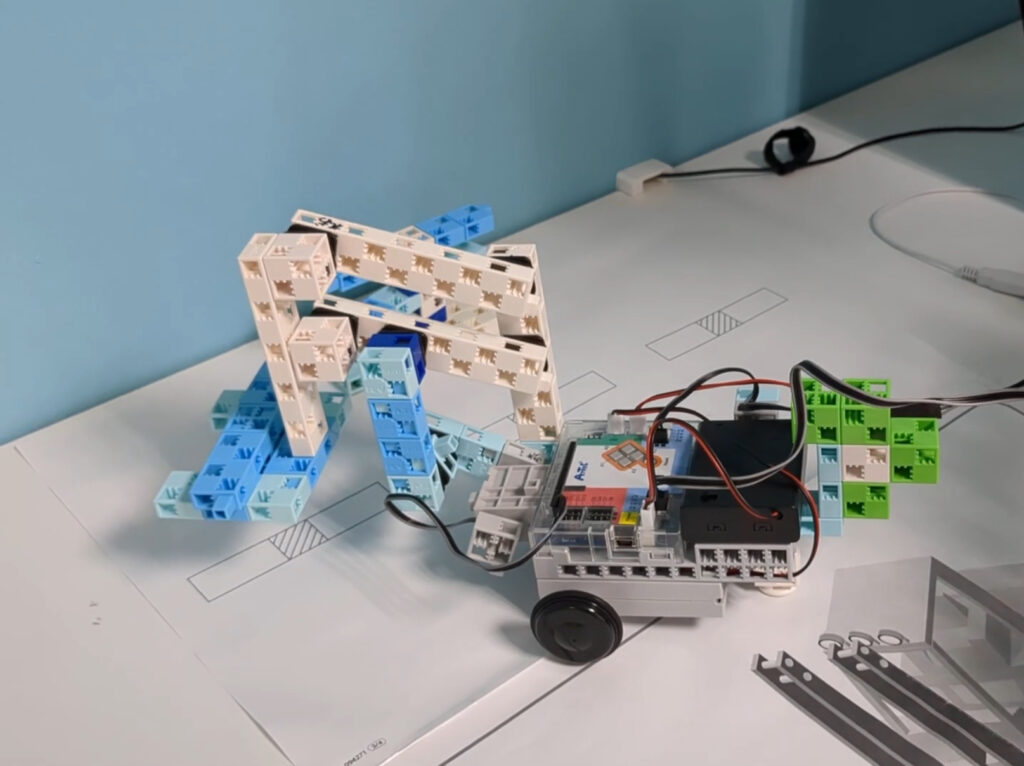
Re.Tさんの作品です。 フォークリフトロボットを作りました。 加速度センサーを傾けることでDCモーターをコントロールし、前後左右に移動します。 また、タッチセンサーを押しながら加速度センサーを前後に傾けると、上下するフ …
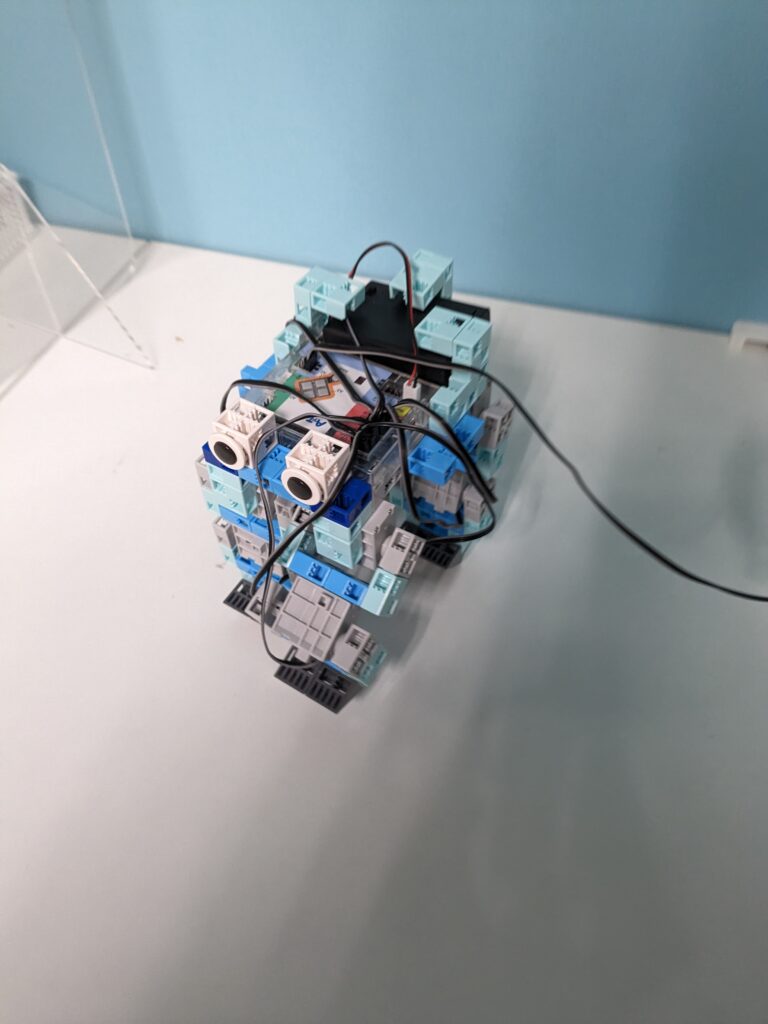
Risさんの作品です。 DCモーターで動く車を、赤外線フォトリフレクターというセンサーで制御する自動車ロボットです。一定の距離(3cm程度)を保つように前後に移動します。 これで前のくるまにぶつからずに、安全に走ることが …
Ha.Kさんの作品です。 サーボモーター8つを使って、4足歩行ロボットを作りました。 タッチセンサーを押すとおすわりする機能もついています。大きな4本足で歩き回る姿はまるで大型犬のようです。 ちゃんとおすわりできたらエサ …
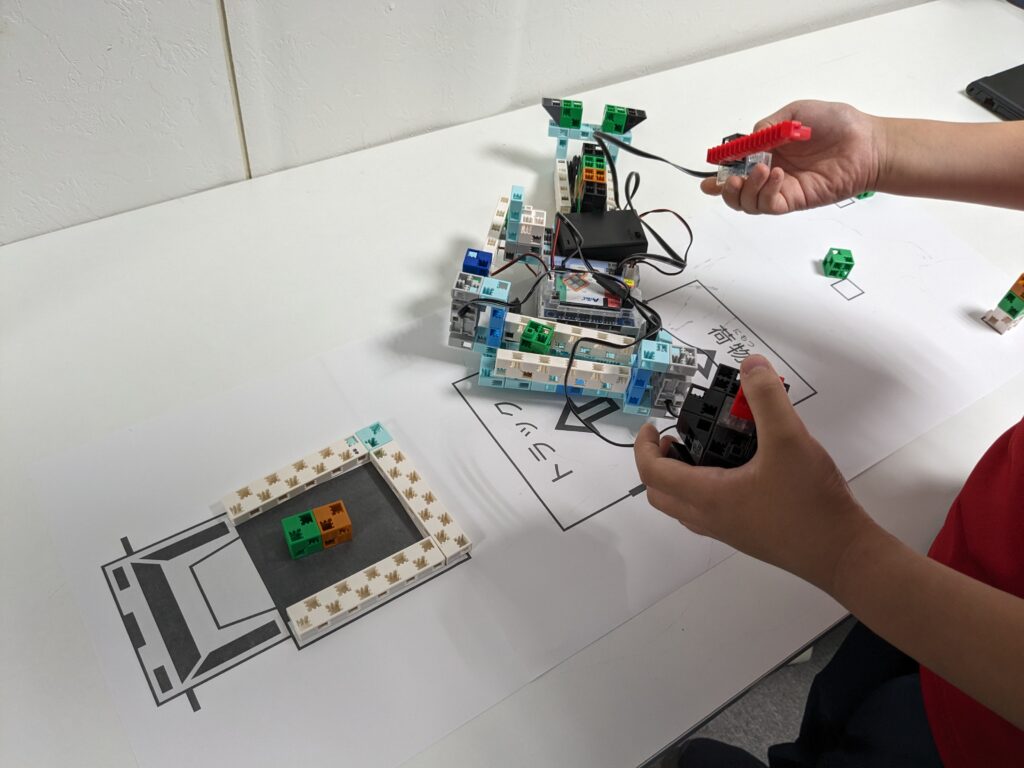
Ko.Nさんの作品です。 加速度センサーで制御する搬送ロボットを作りました。 オリジナルの搬送アームでブロックを掴んで、トラックの荷台に乗せることができます。動画では取り外していますが、重機をイメージした運転席も取り付け …
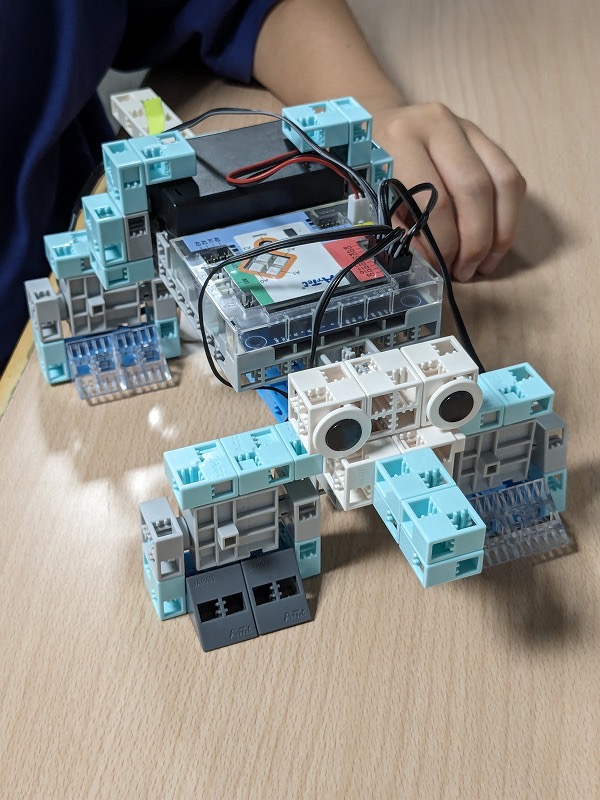
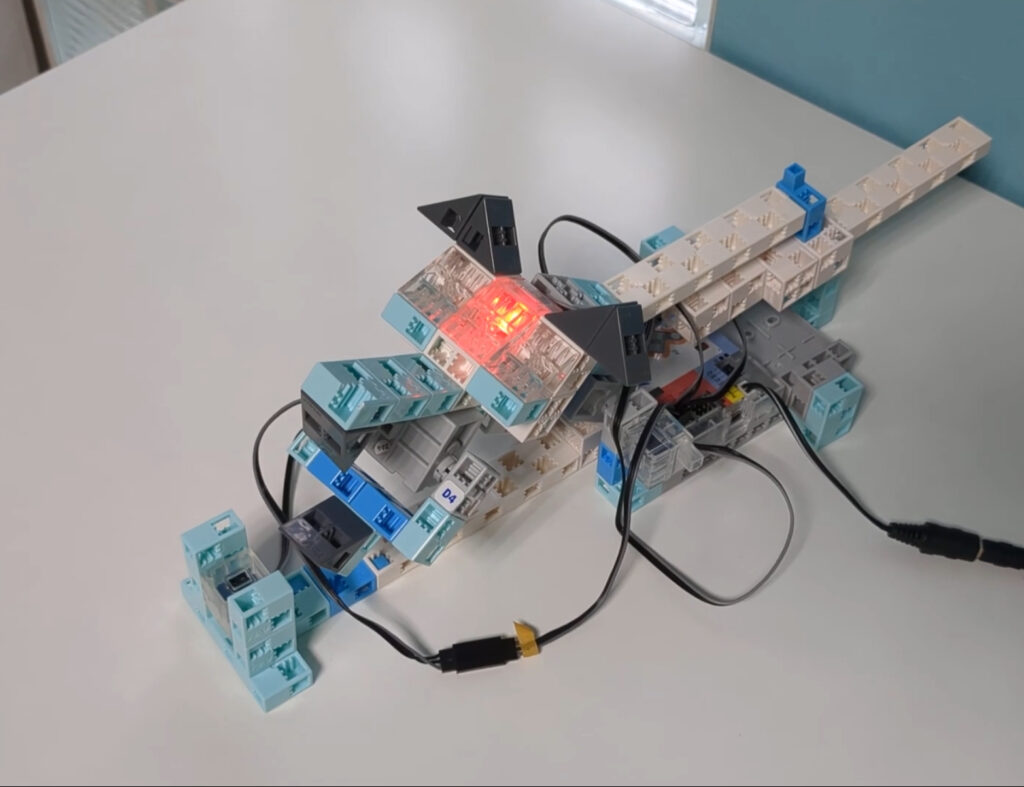
To.Iさんの作品です。 6つのサーボモーターを制御して動かす、ワニ形ロボットを作りました。 まるで本物のワニのようにのしのしと、4本の足で力強く歩みを進めていきます。 噛まれないように逃げないと? ?
To.Iさんの作品です。 6足歩行で動くロボットを作りました。5つのサーボモーターを制御して動いています。とても複雑なうえ、まるで虫のような動きでビックリします。ガレキを超えて突き進め!!
Ri.Sさんの作品です。 DCモーターを制御して動くタクシーロボットを作りました。 制御して途中の人マークのところでお客さんを乗せてゴールへ向かいます!! 枠の中にうまく入ったらゴールです。うまくお客さんを運べるかな?