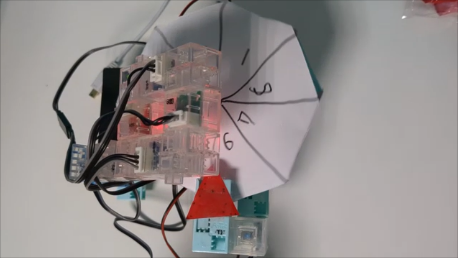
AKさんのLEDの演出がきれいなオリジナル作品で、光るルーレットです。 回転する数はランダムで、どの数字が出るかは運次第!
営業時間 月~土 10:00~19:00
AKさんのLEDの演出がきれいなオリジナル作品で、光るルーレットです。 回転する数はランダムで、どの数字が出るかは運次第!
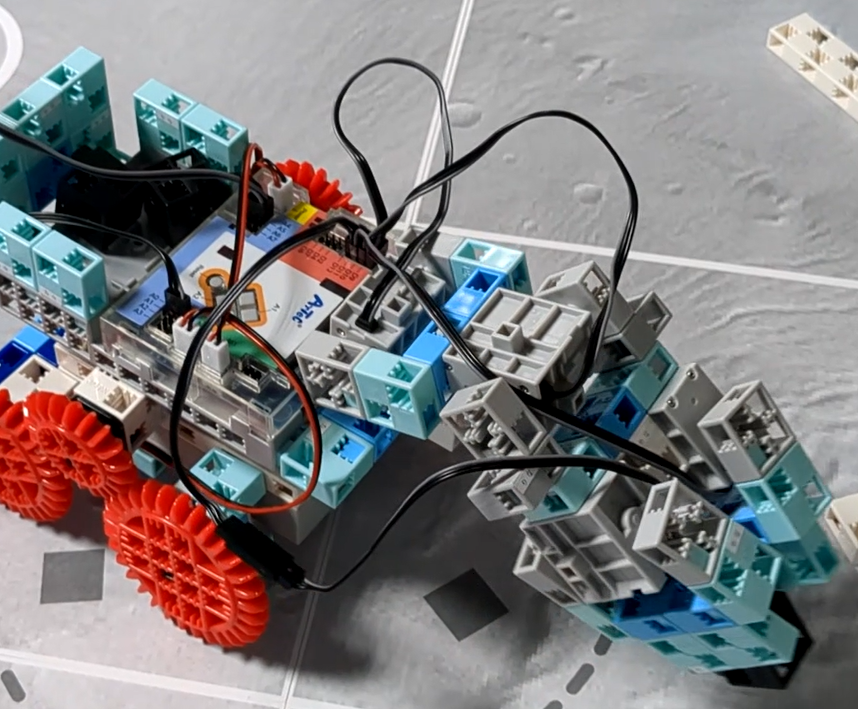
ReMさんの作品です。探査ローバーをつくりました。ブロックを回収したり、運んだりする操作ロボットです。 加速度センサーとタッチセンサーを組み合わせて、DCモーターとサーボモーターを制御します。 3つのブロックを①~③の場 …
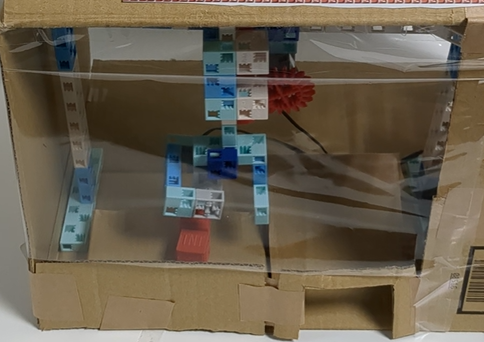
HaKさんの作品です。 たのしいクレーンゲームをつくりました。 サーボモーターで動くようになっていて、箱の中にあるボタンをおすと左右に動いて、ボタンをはなすとキャッチハンドが下に降りて景品を掴みます。 景品は3Dプリンタ …
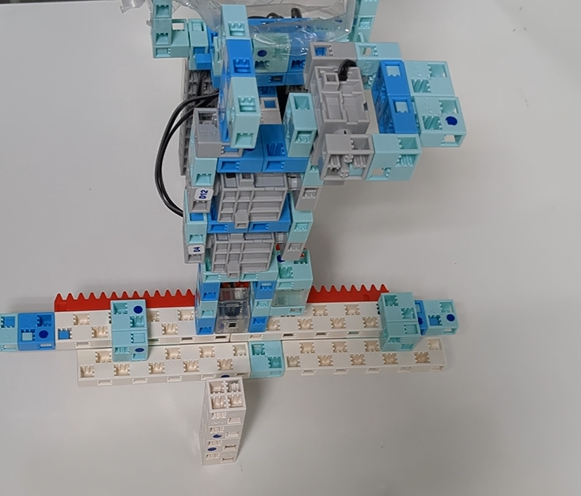
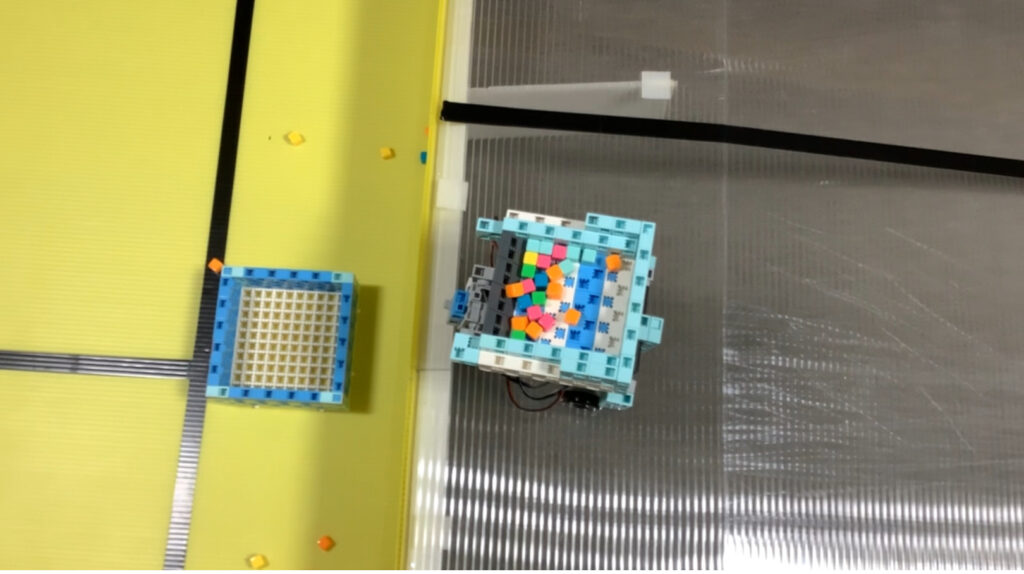
SoTさんの作品です。 赤外線フォトリフレクタをつかって、前にあるブロックをスキャンしながら前進します。そしてブロックをみつけたら、アームで拾い上げて、袋に回収するロボットです。 アームの位置を調整する作業が難しい課題で …
RMさんの作品です。 二つのブロックを、それぞれ拾い上げて、同じ場所に積み重ねるロボットです。 4つのサーボモーターをつかったスカラアームロボット(水平多関節ロボット)を組み立てて、制御するプログラムを丁寧に作り上げまし …
IoTくんの作品です。加速度センサーでロボットを前後左右に動かして、タッチセンサーを押したり離したりするとアームを開閉できます。アームはオリジナル。自分で考えて作りました! そして、ブロックを荷物に見立ててトラックの荷台 …
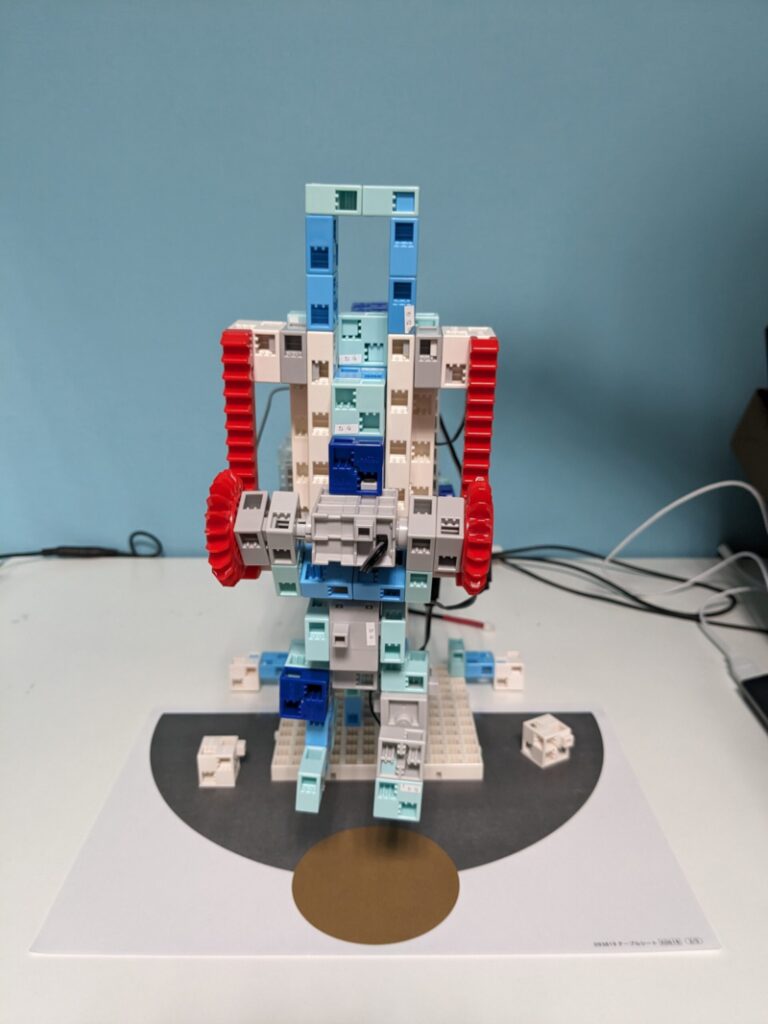
RMさんの作品です。 歯車を動かして操作するロボットです。 ロータリーエンコーダーの仕組みを使って、歯車を回す速さを測っています。2つの赤外線フォトリフレクタで、歯車が何回遮ったかを調べて、回転の速さを調べています。 ま …
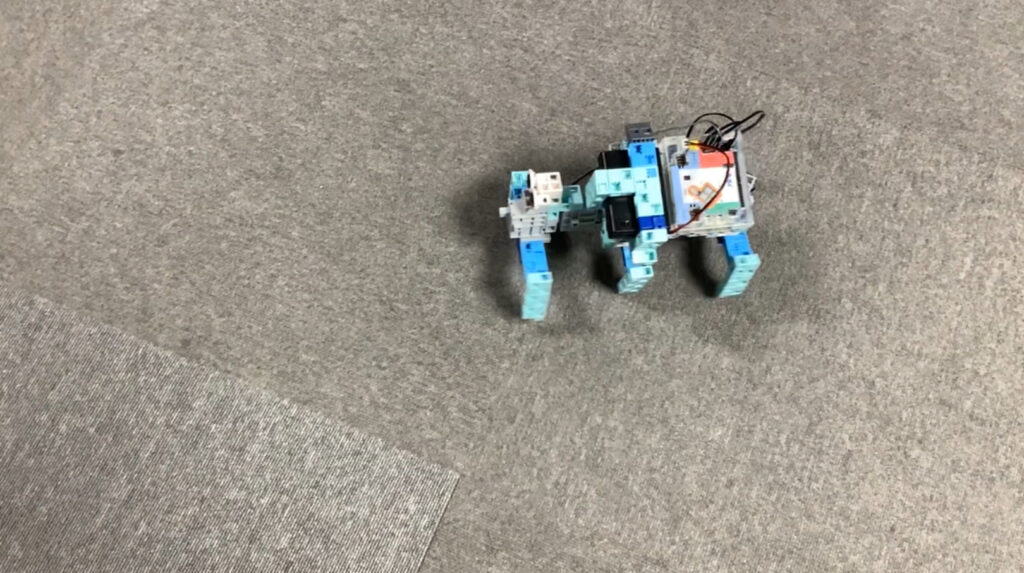
AKさんの作品です。 サーボモーターを使った多足歩行ロボットです。 足と体の関節は5個のサーボモーターでできています。 それぞれのサーボモーターが少しずつ角度を変えることで、前に歩いています。 4つの姿勢を繰り返すことで …

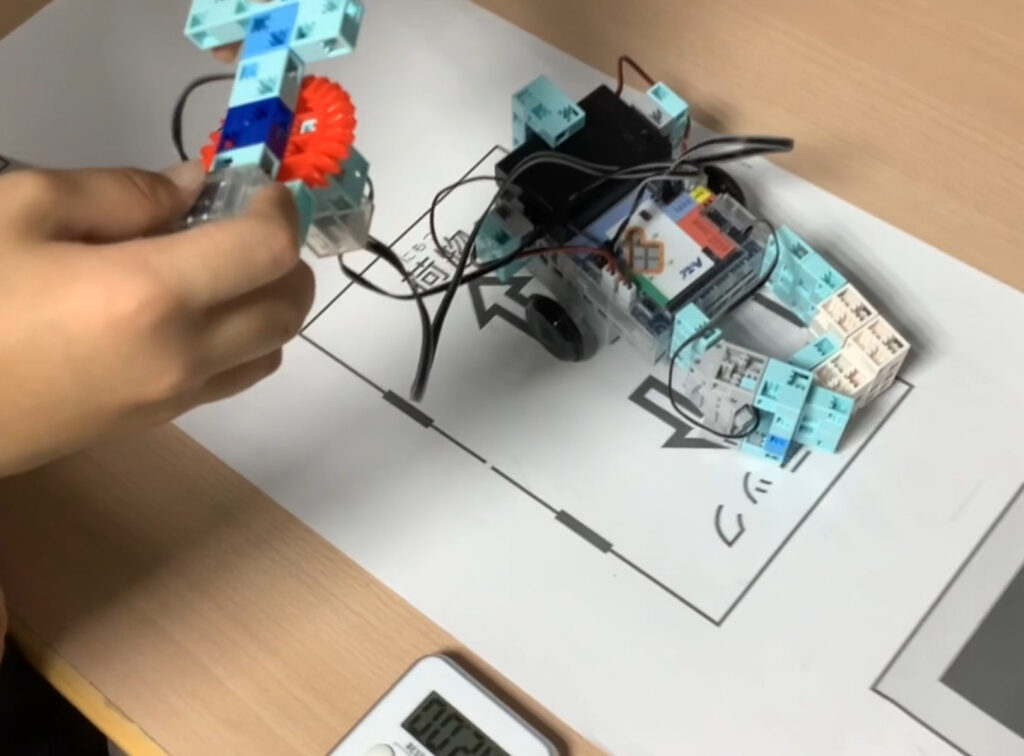
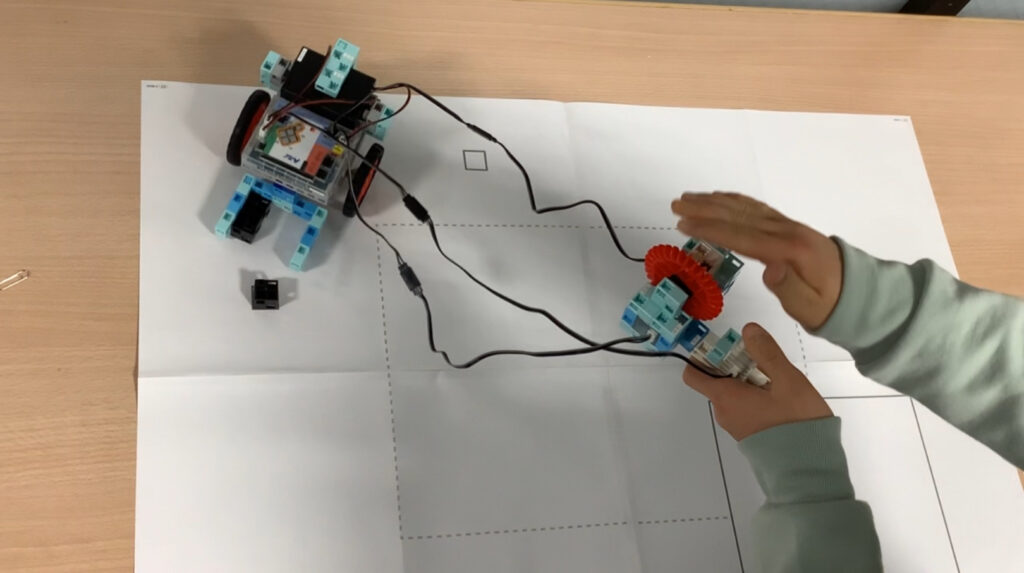
GKさんの作品です。 歯車を使ったシューティングロボットです。 銃の部分は、サーボモーターで向きが変わり、DCモーターに取り付けられた歯車が回転することで輪ゴムを飛ばします。 コントローラは、加速度センサーが付けられてい …
SIさんと、SPさんの作品です。 何個ブロックを箱に入れられるかのゲームです。 サーボモーターを取り付けたロボットで、ブロックを運びます。 坂道を登り、坂道の下の箱にブロックを落とすと得点になります。 ブロックを運ぶ受け …